Die Idee hinter dem Projekt ist ein Charakter mittels Webcam zu steuern. Die Steuerung erfolgt mit 3 auf Daumen und Zeigefinger aufgeklebten Markern. Die große Herausforderung ist, im Bild diese 3 Marker zu erkennen. Hier kommt die Circular Hough Transform (CHT) zum Einsatz, um Kreise zu erkennen.
Download mit Media: https://www.blitzforum.de/upload/file.php?id=11973
Beinhaltet den Source-Code, Escapi-DLL und -API, Schnellanleitung und Druckvorlage für die Marker.
Habe gerade keine Marker zu Hand, weswegen ich einfach in Paint 3 schwarze Punkte gezeichnet und mit der Webcam den Bildschirm abgefilmt habe:
Die Markererkennung ist in folgendem Bild zu sehen:
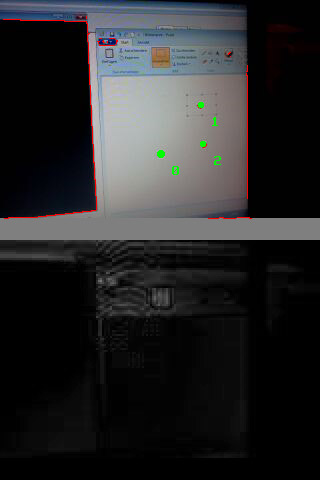
[Oberes Bild: Kantenerkennung (rot) und Markererkennung (grün); unteres Bild: Colornessbild (wie farbig sind die Pixel?)]
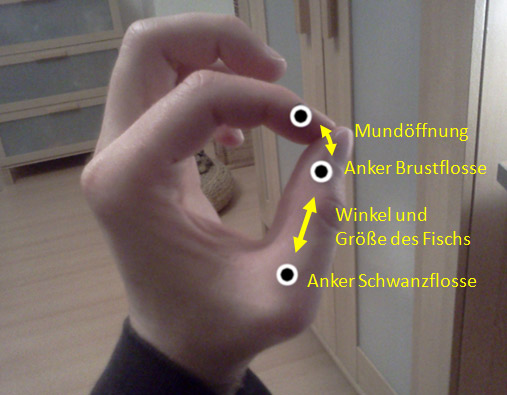
So sind die Marker auf der Hand anzubringen:
Die Markererkennung beruht auf Methoden in der Bildverarbeitung, insbesondere dem Canny-Operator zur Kantenerkennung und der Circular Hough Transform (CHT) zur Kreiserkennung. Die Schritte sind:
1. Lese das Webcambild in ein Array ein. Das Array enthält die Farbwerte im RGB-Farbraum.
2. Projeziere das Bild zum Grauwertbild.
3. Canny-Operator zur Kantenerkennung
3.1 Tiefpassfilterung, d. h. hohe Frequenzen werden gefiltert. Hier mit einem 5x5 Gauß-Kern (bei Photoshop "Gaußscher Weichzeichner")
3.2 Gradientenbild erstellen. Hier mittels SobelX und SobelY.
3.3 Als Kantenpixel gelten diejenigen Pixel, deren Gradientenbeträge in unmittelbarer Nachbarschaft maximal sind.
4. Kreiserkennung mittels HCT
5. Markererkennung anhand von Kriterien, bspw. ob innere Randpixel dunkler sind, als äußere Randpixel
BlitzMax: [AUSKLAPPEN] [EINKLAPPEN] SuperStrict
Framework BRL.Blitz
Import BRL.Max2D
Import BRL.D3D9Max2D
Import BRL.PNGLoader
Import BRL.StandardIO
Import BRL.Random
Import BRL.Audio
Import BRL.WAVLoader
Import Pub.Win32
Import BRL.FreeAudioAudio
Import "escapi.bmx"
Const EPSILON : Float = 0.00001
Global CIRCUMFERENCE : Int[] = [..
4, 12, 20, 20, 28, 36, 36, 44, 52, 60, 60, 68, 76, 76, 84, ..
92, 100, 100, 108, 116, 116, 124, 132, 140, 140, 148, 156, 156, 164, 172, ..
172, 180, 188, 196, 196, 204, 212, 212, 220, 228, 236, 236, 244, 252, 252, ..
260, 268, 268, 276, 284, 292, 292, 300, 308, 308, 316, 324, 332, 332, 340, ..
348, 348, 356, 364, 372, 372, 380, 388, 388, 396, 404, 404, 412, 420, 428, ..
428, 436, 444, 444, 452, 460, 468, 468, 476, 484, 484, 492, 500, 500, 508, ..
516, 524, 524, 532, 540, 540, 548, 556, 564, 564, 572, 580, 580, 588, 596, ..
596, 604, 612, 620, 620, 628, 636, 636, 644, 652, 660, 660, 668, 676, 676, ..
684, 692, 700, 700, 708, 716, 716, 724, 732, 732, 740, 748, 756, 756, 764, ..
772, 772, 780, 788, 796, 796, 804, 812, 812, 820, 828, 828, 836, 844, 852, ..
852, 860, 868, 868, 876, 884, 892, 892, 900, 908, 908, 916, 924, 932, 932, ..
940, 948, 948, 956, 964, 964, 972, 980, 988, 988, 996, 1004, 1004, 1012, 1020, ..
1028, 1028, 1036, 1044, 1044, 1052, 1060, 1060, 1068, 1076, 1084, 1084, 1092, 1100, 1100, ..
1108, 1116, 1124, 1124, 1132, 1140, 1140, 1148, 1156, 1156, 1164, 1172, 1180, 1180, 1188, ..
1196, 1196, 1204, 1212, 1220, 1220, 1228, 1236, 1236, 1244, 1252, 1260, 1260, 1268, 1276, ..
1276, 1284, 1292, 1292, 1300, 1308, 1316, 1316, 1324, 1332, 1332, 1340, 1348, 1356, 1356, ..
1364, 1372, 1372, 1380, 1388, 1388, 1396, 1404, 1412, 1412, 1420, 1428, 1428, 1436, 1444]
Const CAPTURE_WIDTH : Int = 320
Const CAPTURE_HEIGHT : Int = 240
Const DEVICE_IDX : Int = 1
Const USE_IP_CAMERA : Int = True
Const GRADIENT_THRESHOLD : Float = 150.0
Const MIN_RADIUS : Int = 3
Const MAX_RADIUS : Int = 15
Const RATIO_THRESHOLD : Float = 0.4
Const LUMINANCE_DIFFERENCE_THRESHOLD : Float = 0.3
Const COLORNESS_THRESHOLD : Byte = 40
Global gaussian3x3 : Float[3, 3]
gaussian3x3[0, 0] = 1.0 / 16.0 ; gaussian3x3[1, 0] = 2.0 / 16.0 ; gaussian3x3[2, 0] = 1.0 / 16.0
gaussian3x3[0, 1] = 2.0 / 16.0 ; gaussian3x3[1, 1] = 4.0 / 16.0 ; gaussian3x3[2, 1] = 2.0 / 16.0
gaussian3x3[0, 2] = 1.0 / 16.0 ; gaussian3x3[1, 2] = 2.0 / 16.0 ; gaussian3x3[2, 2] = 1.0 / 16.0
Global gaussian5x5 : Float[5, 5]
gaussian5x5[0, 0] = 1.0 / 256.0 ; gaussian5x5[1, 0] = 4.0 / 256.0 ; gaussian5x5[2, 0] = 6.0 / 256.0 ; gaussian5x5[3, 0] = 4.0 / 256.0 ; gaussian5x5[4, 0] = 1.0 / 256.0
gaussian5x5[0, 1] = 4.0 / 256.0 ; gaussian5x5[1, 1] = 16.0 / 256.0 ; gaussian5x5[2, 1] = 24.0 / 256.0 ; gaussian5x5[3, 1] = 16.0 / 256.0 ; gaussian5x5[4, 1] = 4.0 / 256.0
gaussian5x5[0, 2] = 6.0 / 256.0 ; gaussian5x5[1, 2] = 24.0 / 256.0 ; gaussian5x5[2, 2] = 36.0 / 256.0 ; gaussian5x5[3, 2] = 24.0 / 256.0 ; gaussian5x5[4, 2] = 6.0 / 256.0
gaussian5x5[0, 3] = 4.0 / 256.0 ; gaussian5x5[1, 3] = 16.0 / 256.0 ; gaussian5x5[2, 3] = 24.0 / 256.0 ; gaussian5x5[3, 3] = 16.0 / 256.0 ; gaussian5x5[4, 3] = 4.0 / 256.0
gaussian5x5[0, 4] = 1.0 / 256.0 ; gaussian5x5[1, 4] = 4.0 / 256.0 ; gaussian5x5[2, 4] = 6.0 / 256.0 ; gaussian5x5[3, 4] = 4.0 / 256.0 ; gaussian5x5[4, 4] = 1.0 / 256.0
Global sobelx : Int[3, 3]
sobelx[0, 0] = -1 ; sobelx[1, 0] = 0 ; sobelx[2, 0] = 1
sobelx[0, 1] = -2 ; sobelx[1, 1] = 0 ; sobelx[2, 1] = 2
sobelx[0, 2] = -1 ; sobelx[1, 2] = 0 ; sobelx[2, 2] = 1
Global sobely : Int[3, 3]
sobely[0, 0] = -1 ; sobely[1, 0] = -2 ; sobely[2, 0] = -1
sobely[0, 1] = 0 ; sobely[1, 1] = 0 ; sobely[2, 1] = 0
sobely[0, 2] = 1 ; sobely[1, 2] = 2 ; sobely[2, 2] = 1
Local deviceCount : Int = CountCaptureDevices()
Print "Devices:"
For Local i : Int = 0 Until deviceCount
Print i + ") " + CaptureDeviceName(i)
Next
If deviceCount <= DEVICE_IDX Then Throw "Capture device " + DEVICE_IDX + " not found"
Global device : TCaptureDevice = OpenCaptureDevice(DEVICE_IDX, CAPTURE_WIDTH, CAPTURE_HEIGHT)
If device = Null Then Throw "Unable to open capture device '" + CaptureDeviceName(DEVICE_IDX) + "'"
Print "Connected with '" + CaptureDeviceName(device.device) + "'"
Global source : TImage
Global sourceRGB : Byte[CAPTURE_WIDTH, CAPTURE_HEIGHT, 3]
Global sourceGray : Byte[CAPTURE_WIDTH, CAPTURE_HEIGHT]
Global sourceConvolved : Byte[CAPTURE_WIDTH, CAPTURE_HEIGHT]
Global sourceGradient : Float[CAPTURE_WIDTH, CAPTURE_HEIGHT, 3]
Global sourceEdge : Int[CAPTURE_WIDTH, CAPTURE_HEIGHT]
Global sourceHough : Int[CAPTURE_WIDTH, CAPTURE_HEIGHT, MAX_RADIUS - MIN_RADIUS]
Global circleQuality : Float[CAPTURE_WIDTH, CAPTURE_HEIGHT, MAX_RADIUS - MIN_RADIUS]
Const SINGLE_POINT : Int = 0
Const TOP_POINT : Int = 1
Const BOTTOM_POINT : Int = 2
Global circles : Int[3, 3]
Const MODE_ANIMATE : Int = 0
Const MODE_DEBUG : Int = 1
Const MODE_PAUSE : Int = 2
Local mode : Int = MODE_DEBUG
If SetAudioDriver("FreeAudio") Then
Print "Current audio driver: FreeAudio"
Else
Print "Unable to set audio driver FreeAudio"
EndIf
LoadFish()
AppTitle = CaptureDeviceName(device.device)
Graphics 800, 600, 0, 60, GRAPHICS_BACKBUFFER
SetBlend ALPHABLEND
While Not KeyDown(KEY_ESCAPE)
If KeyHit(KEY_P) Then
mode = MODE_PAUSE
ElseIf KeyHit(KEY_A) Then
mode = MODE_ANIMATE
ElseIf KeyHit(KEY_D) Then
mode = MODE_DEBUG
EndIf
If KeyHit(KEY_S) And device.pix <> Null Then
SavePixmapPNG(device.pix, "snapshot.png", 0)
Print "Saved to snapshot.png"
EndIf
Select mode
Case MODE_ANIMATE
Cls()
ReadSource()
ProjectToGray()
Blur()
CalculateGradients()
DetermineEdges()
CircularHoughTransform()
FilterCircles()
OrderCircles()
DrawFish()
Flip()
Case MODE_DEBUG
Cls()
ReadSource()
ProjectToGray()
Blur()
CalculateGradients()
DetermineEdges()
DrawEdges()
CircularHoughTransform()
FilterCircles()
OrderCircles()
DrawCircles()
DrawColorness()
Flip()
Case MODE_PAUSE
Cls()
Analyse()
DrawEdges()
Flip()
End Select
Wend
CloseCaptureDevice(device)
device = Null
End
Function ReadSource()
source = CaptureFrame(device)
If source = Null Then
Print "Device lost"
Else
If USE_IP_CAMERA Then
SetColor 127, 127, 127
DrawRect 0, CAPTURE_HEIGHT - CAPTURE_HEIGHT * 0.09, CAPTURE_WIDTH, CAPTURE_HEIGHT * 0.09
GrabImage source, 0, 0
EndIf
EndIf
Local pixmap : TPixmap = LockImage(source, 0, True, False)
For Local x : Int = 0 Until PixmapWidth(pixmap)
For Local y : Int = 0 Until PixmapHeight(pixmap)
Local argb : Int = ReadPixel(pixmap, x, y)
sourceRGB[x, y, 0] = (argb & $00FF0000) Shr 16
sourceRGB[x, y, 1] = (argb & $0000FF00) Shr 8
sourceRGB[x, y, 2] = argb & $000000FF
Next
Next
UnlockImage(source)
End Function
Function ProjectToGray()
For Local x : Int = 0 Until CAPTURE_WIDTH
For Local y : Int = 0 Until CAPTURE_HEIGHT
sourceGray[x, y] = (sourceRGB[x, y, 0] + sourceRGB[x, y, 1] + sourceRGB[x, y, 2]) / 3
Next
Next
End Function
Function Blur()
For Local x : Int = 2 Until CAPTURE_WIDTH - 2
For Local y : Int = 2 Until CAPTURE_HEIGHT - 2
Local accu : Float = 0.0
For Local i : Int = -2 To 2
For Local j : Int = -2 To 2
accu :+ gaussian5x5[i + 2, j + 2] * sourceGray[x + i, y + j]
Next
Next
sourceConvolved[x, y] = accu
Next
Next
End Function
Function CalculateGradients()
For Local x : Int = 2 Until CAPTURE_WIDTH - 2
For Local y : Int = 2 Until CAPTURE_HEIGHT - 2
Local sx : Int = 0, sy : Int = 0
For Local i : Int = -1 To 1
For Local j : Int = -1 To 1
sx = sx + sobelx[i + 1, j + 1] * sourceConvolved[x + i, y + j]
sy = sy + sobely[i + 1, j + 1] * sourceConvolved[x + i, y + j]
Next
Next
sourceGradient[x, y, 0] = Sqr(sx * sx + sy * sy)
sourceGradient[x, y, 1] = sx
sourceGradient[x, y, 2] = sy
Next
Next
End Function
Function DetermineEdges()
For Local x : Int = 3 Until CAPTURE_WIDTH - 3
For Local y : Int = 3 Until CAPTURE_HEIGHT - 3
If sourceGradient[x, y, 0] < GRADIENT_THRESHOLD Then
sourceEdge[x, y] = False
Continue
EndIf
Local sx : Float = sourceGradient[x, y, 1]
Local sy : Float = sourceGradient[x, y, 2]
Local ga : Float, gb : Float
If Abs(sx) < EPSILON Then
If sy > 0.0 Then
ga = sourceGradient[x, y + 1, 0]
gb = sourceGradient[x, y - 1, 0]
Else
ga = sourceGradient[x, y - 1, 0]
gb = sourceGradient[x, y + 1, 0]
EndIf
ElseIf Abs(sy) < EPSILON Then
If sx > 0.0 Then
ga = sourceGradient[x + 1, y, 0]
gb = sourceGradient[x - 1, y, 0]
Else
ga = sourceGradient[x - 1, y, 0]
gb = sourceGradient[x + 1, y, 0]
EndIf
Else If sx > 0.0 Then
If sy > 0.0 Then
ga = (sourceGradient[x + 1, y + 1, 0] + sourceGradient[x, y + 1, 0]) / 2.0
gb = (sourceGradient[x - 1, y - 1, 0] + sourceGradient[x, y - 1, 0]) / 2.0
Else
ga = (sourceGradient[x + 1, y - 1, 0] + sourceGradient[x, y - 1, 0]) / 2.0
gb = (sourceGradient[x - 1, y + 1, 0] + sourceGradient[x, y + 1, 0]) / 2.0
EndIf
Else If sx < 0.0 Then
If sy > 0.0 Then
ga = (sourceGradient[x - 1, y + 1, 0] + sourceGradient[x, y + 1, 0]) / 2.0
gb = (sourceGradient[x + 1, y - 1, 0] + sourceGradient[x, y - 1, 0]) / 2.0
Else
ga = (sourceGradient[x - 1, y - 1, 0] + sourceGradient[x, y - 1, 0]) / 2.0
gb = (sourceGradient[x + 1, y + 1, 0] + sourceGradient[x, y + 1, 0]) / 2.0
EndIf
Else
EndIf
sourceEdge[x, y] = sourceGradient[x, y, 0] > Max(ga, gb)
Next
Next
End Function
Function DrawEdges()
Local oldRed : Int, oldGreen : Int, oldBlue : Int
GetColor(oldRed, oldGreen, oldBlue)
SetColor 255, 0, 0
For Local x : Int = 0 Until CAPTURE_WIDTH
For Local y : Int = 0 Until CAPTURE_HEIGHT
If sourceEdge[x, y] Then Plot x, y
Next
Next
SetColor(oldRed, oldGreen, oldBlue)
End Function
Function CircularHoughTransform()
For Local x : Int = 0 Until CAPTURE_WIDTH
For Local y : Int = 0 Until CAPTURE_HEIGHT
For Local r : Int = MIN_RADIUS Until MAX_RADIUS
sourceHough[x, y, r - MIN_RADIUS] = 0
Next
Next
Next
For Local x : Int = MAX_RADIUS Until CAPTURE_WIDTH - MAX_RADIUS
For Local y : Int = MAX_RADIUS Until CAPTURE_HEIGHT - MAX_RADIUS
If sourceEdge[x, y] Then
For Local r : Int = MIN_RADIUS Until MAX_RADIUS
RasterHoughCircle(x, y, r)
Next
EndIf
Next
Next
End Function
Function RasterHoughCircle(mx : Int, my : Int, radius : Int)
Local f : Int = 1 - radius
Local ddF_x : Int = 0
Local ddF_y : Int = -2 * radius
Local x : Int = 0
Local y : Int = radius
SetHoughPoint(mx, my + radius, radius)
SetHoughPoint(mx, my - radius, radius)
SetHoughPoint(mx + radius, my, radius)
SetHoughPoint(mx - radius, my, radius)
While x < y
If f >= 0 Then
y = y - 1
ddF_y = ddF_y + 2
f = f + ddF_y
EndIf
x = x + 1
ddF_x = ddF_x + 2
f = f + ddF_x + 1
SetHoughPoint(mx + x, my + y, radius)
SetHoughPoint(mx - x, my + y, radius)
SetHoughPoint(mx + x, my - y, radius)
SetHoughPoint(mx - x, my - y, radius)
SetHoughPoint(mx + y, my + x, radius)
SetHoughPoint(mx - y, my + x, radius)
SetHoughPoint(mx + y, my - x, radius)
SetHoughPoint(mx - y, my - x, radius)
Wend
End Function
Function SetHoughPoint(x : Int, y : Int, r : Int)
sourceHough[x, y, r - MIN_RADIUS] :+ 1
End Function
Function FilterCircles()
For Local x : Int = MAX_RADIUS Until CAPTURE_WIDTH - MAX_RADIUS
For Local y : Int = MAX_RADIUS Until CAPTURE_HEIGHT - MAX_RADIUS
For Local r : Int = MIN_RADIUS Until MAX_RADIUS
If Not IsCircle(x, y, r) Then sourceHough[x, y, r - MIN_RADIUS] = 0
Next
Next
Next
For Local x : Int = 0 Until CAPTURE_WIDTH
For Local y : Int = 0 Until CAPTURE_HEIGHT
For Local r : Int = MIN_RADIUS Until MAX_RADIUS
If sourceHough[x, y, r - MIN_RADIUS] > 0 Then
Local bestX : Int = x, bestY : Int = y, bestR : Int = r
Local bestRatio : Float = Float(sourceHough[x, y, r - MIN_RADIUS]) / CIRCUMFERENCE[r]
For Local r2 : Int = MIN_RADIUS Until MAX_RADIUS
For Local x2 : Int = Max(0, x - MAX_RADIUS - r2) Until Min(CAPTURE_WIDTH, x + MAX_RADIUS + r2)
For Local y2 : Int = Max(0, y - MAX_RADIUS - r2) Until Min(CAPTURE_HEIGHT, y + MAX_RADIUS + r2)
Local dx : Int = x - x2
Local dy : Int = y - y2
Local d : Int = Floor(Sqr(dx * dx + dy + dy))
If d <= (r + r2) Then
Local ratio : Float = Float(sourceHough[x2, y2, r2 - MIN_RADIUS]) / CIRCUMFERENCE[r]
If ratio > bestRatio Then
bestX = x2
bestY = y2
bestR = r2
EndIf
EndIf
Next
Next
Next
For Local r2 : Int = MIN_RADIUS Until MAX_RADIUS
For Local x2 : Int = Max(0, x - MAX_RADIUS - r2) Until Min(CAPTURE_WIDTH, x + MAX_RADIUS + r2)
For Local y2 : Int = Max(0, y - MAX_RADIUS - r2) Until Min(CAPTURE_HEIGHT, y + MAX_RADIUS + r2)
If bestX <> x2 Or bestY <> y2 Or bestR <> r2 Then sourceHough[x2, y2, r2 - MIN_RADIUS] = 0
Next
Next
Next
EndIf
Next
Next
Next
End Function
Function IsCircle:Int(mx : Int, my : Int, r : Int)
If sourceHough[mx, my, r - MIN_RADIUS] < (CIRCUMFERENCE[r] * RATIO_THRESHOLD) Then Return False
Local innerRGB : Int[3]
Local outerRGB : Int[3]
For Local angle : Int = 0 Until 360 Step 90
Local dx : Int = Cos(angle) * 2
Local dy : Int = Sin(angle) * 2
Local x : Int = mx + r * Cos(angle)
Local y : Int = my + r * Sin(angle)
For Local i : Int = 0 To 2
innerRGB[i] :+ sourceRGB[x - dx, y - dy, i]
outerRGB[i] :+ sourceRGB[x + dx, y + dy, i]
Next
Next
For Local i : Int = 0 To 2
innerRGB[i] :/ 4
outerRGB[i] :/ 4
Next
Local innerHSV : Float[3]
Local outerHSV : Float[3]
RGBToHSV(innerRGB[0], innerRGB[1], innerRGB[2], innerHSV[0], innerHSV[1], innerHSV[2])
RGBToHSV(outerRGB[0], outerRGB[1], outerRGB[2], outerHSV[0], outerHSV[1], outerHSV[2])
If (innerHSV[2] > outerHSV[2]) Or (outerHSV[2] - innerHSV[2] <= LUMINANCE_DIFFERENCE_THRESHOLD) Then Return False
Local innerColorness : Byte = Colorness(innerRGB[0], innerRGB[1], innerRGB[2])
If innerColorness >= COLORNESS_THRESHOLD Then Return False
Return True
End Function
Function OrderCircles()
Local i : Int = 0
For Local x : Int = MAX_RADIUS Until CAPTURE_WIDTH - MAX_RADIUS
For Local y : Int = MAX_RADIUS Until CAPTURE_HEIGHT - MAX_RADIUS
For Local r : Int = MIN_RADIUS Until MAX_RADIUS
If sourceHough[x, y, r - MIN_RADIUS] > 0 Then
circles[i, 0] = x
circles[i, 1] = y
circles[i, 2] = r
i :+ 1
If i > 2 Then i = 0
EndIf
Next
Next
Next
Local singleIdx : Int
Local topIdx : Int
Local bottomIdx : Int
Local dx01 : Int = Abs(circles[0, 0] - circles[1, 0])
Local dx02 : Int = Abs(circles[0, 0] - circles[2, 0])
Local dx12 : Int = Abs(circles[1, 0] - circles[2, 0])
If dx01 < dx02 Then
If dx01 < dx12 Then
singleIdx = 2
Else
singleIdx = 0
EndIf
Else
If dx02 < dx12 Then
singleIdx = 1
Else
singleIdx = 0
EndIf
EndIf
If singleIdx <> SINGLE_POINT Then ExchangeCircles(singleIdx, SINGLE_POINT)
If circles[TOP_POINT, 1] > circles[BOTTOM_POINT, 1] Then ExchangeCircles(TOP_POINT, BOTTOM_POINT)
End Function
Function ExchangeCircles(fromIdx:Int, toIdx : Int)
Local temp : Int
For Local i : Int = 0 To 2
temp = circles[fromIdx, i]
circles[fromIdx, i] = circles[toIdx, i]
circles[toIdx, i] = temp
Next
End Function
Function DrawCircles()
SetColor 0, 255, 0
For Local i : Int = 0 To 2
Local x : Int = circles[i, 0]
Local y : Int = circles[i, 1]
Local r : Int = circles[i, 2]
DrawOval x - r, y - r, 2 * r, 2 * r
DrawText i, x + 10, y + 10
Next
SetColor 255, 255, 255
End Function
Function Analyse()
SetColor 255, 255, 255
DrawImage source, 0, 0
Local mx : Int = MouseX(), my : Int = MouseY()
If mx < 0 Or mx >= CAPTURE_WIDTH Or my < 0 Or my >= CAPTURE_HEIGHT Then Return
Local h : Float, s : Float, v : Float
RGBToHSV(sourceRGB[mx, my, 0], sourceRGB[mx, my, 1], sourceRGB[mx, my, 2], h, s, v)
DrawText "HSV: " + Int(h) + "°, " + Int(s * 100) + "%, " + Int(v * 100) + "%", mx + 10, my + 10
DrawText "RGB: " + sourceRGB[mx, my, 0] + ", " + sourceRGB[mx, my, 1] + ", " + sourceRGB[mx, my, 2], mx + 10, my + 25
DrawText "Coloness: " + Colorness(sourceRGB[mx, my, 0], sourceRGB[mx, my, 1], sourceRGB[mx, my, 2]), mx + 10, my + 40
SetColor sourceRGB[mx, my, 0], sourceRGB[mx, my, 2], sourceRGB[mx, my, 2]
DrawRect mx + 10, my, 7, 7
SetColor 255, 255, 255
End Function
Function RGBToHSV(red : Int, green : Int, blue : Int, hue : Float Var, saturation : Float Var, value : Float Var)
Local r : Float = red / 255.0
Local g : Float = green / 255.0
Local b : Float = blue / 255.0
Local maxRGB : Float = Max(Max(r, g), b)
Local minRGB : Float = Min(Min(r, g), b)
If Abs(maxRGB - minRGB) <= EPSILON And (Abs(r - g) <= EPSILON And Abs(g - b) <= EPSILON) Then
hue = 0.0
ElseIf maxRGB = r Then
hue = 60.0 * (g - b) / (maxRGB - minRGB)
ElseIf maxRGB = g Then
hue = 60.0 * (2.0 + (b - r) / (maxRGB - minRGB))
ElseIf maxRGB = b Then
hue = 60.0 * (4.0 + (r - g) / (maxRGB - minRGB))
EndIf
If hue < 0.0 Then hue = hue + 360.0
If maxRGB <= EPSILON And (r <= EPSILON And g <= EPSILON And b <= EPSILON) Then
saturation = 0.0
Else
saturation = (maxRGB - minRGB) / maxRGB
EndIf
value = maxRGB
End Function
Function Colorness:Byte(r : Byte, g : Byte, b : Byte)
Local u : Float[3]
u[0] = 255.0
u[1] = 255.0
u[2] = 255.0
Local v : Float[3]
v[0] = g * u[2] - b * u[1]
v[1] = b * u[0] - r * u[2]
v[2] = r * u[1] - g * u[0]
Return Sqr(v[0] * v[0] + v[1] * v[1] + v[2] * v[2]) / Sqr(u[0] * u[0] + u[1] * u[1] + u[2] * u[2])
End Function
Function DrawColorness()
Local pixmap : TPixmap = CreatePixmap(CAPTURE_WIDTH, CAPTURE_HEIGHT, PF_I8)
Local pointer : Byte Ptr = PixmapPixelPtr(pixmap)
For Local x : Int = 0 Until CAPTURE_WIDTH
For Local y : Int = 0 Until CAPTURE_HEIGHT
Local colorness : Int = Colorness(sourceRGB[x, y, 0], sourceRGB[x, y, 1], sourceRGB[x, y, 2])
colorness = (Float(colorness) / 209.0) * 255
If colorness > 255 Then colorness = 255
pointer[y * CAPTURE_WIDTH + x] = colorness
Next
Next
DrawPixmap pixmap, 0, CAPTURE_HEIGHT
End Function
Type TParticle
Global bubble : TImage
Field sprite : TImage
Field lifeTime : Int
Field scale : Float
Field positionX : Float
Field positionY : Float
Field velocityX : Float
Field velocityY : Float
Method Update()
positionX :+ velocityX
positionY :+ velocityY
lifeTime :- 1
If lifeTime < 0 Then lifeTime = 0
End Method
Method Render()
SetScale scale, scale
SetAlpha 1.0 - 0.7 * ((10 - Min(10, lifeTime)) / 10.0)
DrawImage sprite, positionX, positionY
SetAlpha 1.0
SetScale 1.0, 1.0
End Method
Function Init()
bubble = LoadImage("animation/bubble.png")
End Function
End Type
Type TEmitter
Global bubbleSound : TSound
Global bubbleChannel : TChannel
Field particles : TList = New TList
Field positionX : Float
Field positionY : Float
Method Emit()
bubbleSound.Play(bubbleChannel)
For Local i : Int = 0 Until Rand(3, 5)
Local particle : TParticle = New TParticle
Local angle : Float = Rand(270 - 20, 270 + 20)
Local vel : Float = Rand(10, 70) / 10.0
particle.sprite = TParticle.bubble
particle.positionX = Self.positionX
particle.positionY = Self.positionY
particle.velocityX = vel * Cos(angle)
particle.velocityY = vel * Sin(angle)
particle.scale = 0.03 * vel + 0.2
particle.lifeTime = Rand(30, 60)
particles.AddLast(particle)
Next
End Method
Method Update()
Local toRemove : TList = New TList
For Local particle : TParticle = EachIn particles
particle.Update()
If particle.lifeTime = 0 Then toRemove.AddLast(particle)
Next
For Local particle : TParticle = EachIn toRemove
particles.remove(particle)
Next
End Method
Method Render()
For Local particle : TParticle = EachIn particles
particle.Render()
Next
End Method
Function Init()
bubbleSound = LoadSound("animation/bubble.wav")
bubbleChannel = bubbleSound.Cue()
End Function
End Type
Global background : TImage
Global body : TImage
Global mouth : TImage
Global emitter : TEmitter
Function LoadFish()
background : TImage = LoadImage("animation/background.png")
body : TImage = LoadImage("animation/body.png")
SetImageHandle body, 270, 404
mouth : TImage = LoadImage("animation/mouth.png")
TParticle.Init()
TEmitter.Init()
emitter = New TEmitter
End Function
Global bubbleActive : Int = 0
Function DrawFish()
Local x1 : Int = circles[SINGLE_POINT, 0]
Local y1 : Int = circles[SINGLE_POINT, 1]
Local x2 : Int = circles[TOP_POINT, 0]
Local y2 : Int = circles[TOP_POINT, 1]
Local x3 : Int = circles[BOTTOM_POINT, 0]
Local y3 : Int = circles[BOTTOM_POINT, 1]
Local dx : Float = x1 - x3
Local dy : Float = y1 - y3
Local bodyAngle : Float = 270 - ATan2(dx, dy)
Local bodyScale : Float = (Sqr(dx * dx + dy * dy) / 350.0)
Local vecA : Int[2], vecB : Int[2]
vecA[0] = x2 - x1
vecA[1] = y2 - y1
vecB[0] = x3 - x1
vecB[1] = y3 - y1
Local dotProduct : Int = vecA[0] * vecB[0] + vecA[1] * vecB[1]
Local mouthAngle : Float = ACos(dotProduct / (Sqr(vecA[0]^2 + vecA[1]^2)*Sqr(vecB[0]^2 + vecB[1]^2)))
If mouthAngle < 0.0 Then
mouthAngle = 0.0
ElseIf mouthAngle > 45.0 Then
mouthAngle = 45.0
EndIf
Local mouthX : Float = circles[SINGLE_POINT, 0] + 440 * bodyScale * Cos(bodyAngle - 10)
Local mouthY : Float = circles[SINGLE_POINT, 1] + 440 * bodyScale * Sin(bodyAngle - 10)
If mouthAngle < 35.0 Then
bubbleActive = bubbleActive - 1
If bubbleActive < 0 Then bubbleActive = 0
ElseIf bubbleActive = 0 Then
bubbleActive = 5
emitter.positionX = mouthX
emitter.positionY = mouthY
emitter.Emit()
EndIf
emitter.Update()
SetAlpha 1.0
SetColor 255, 255, 255
DrawImage source, 0, 0
DrawCircles()
SetAlpha 0.7
DrawImage background, 0, 0
Local sign : Float
If x1 < x2 Or x1 < x2 Then
sign = +1.0
Else
sign = -1.0
EndIf
SetTransform bodyAngle, bodyScale, sign * bodyScale
DrawImage body, circles[SINGLE_POINT, 0], circles[SINGLE_POINT, 1]
Local mouthScale : Float = bodyScale * (Tan(mouthAngle) + 0.2)
SetScale mouthScale, mouthScale
SetRotation bodyAngle
DrawImage mouth, mouthX, mouthY
SetTransform 0, 1, 1
SetHandle 0, 0
SetColor 255, 255, 255
SetAlpha 1.0
emitter.Render()
End Function
|