Hallo,
ich möchte ein kleineres Projekt von mir vorstellen, was aus Interesse und zum vertiefen der Kenntnisse im Bereich Trigonometrie entstanden ist.
Es handelt sich um eine Lenkachsensteuerung bei Fahrzeugen. Sie berechnet die optimalen Winkel aller lenkbaren Räder aller Achsen eines Fahrzeugs um den Gummiabrieb verschwindent gering zu halten.
Um ein Fahrzeug zu definieren stehen dem Benutzer zwei Arten von Achsen zur Verfügung: Zum einen können starre Achsen und zum anderen lenkbare Achsen definiert werden. Die lenkbaren Achsen teilen sich auf in eine "Steuerachse" und beliebig viele "normale" lenkbare Achsen. Mit der Steuerachse kann der Winkel der Kurve eingestellt werden, die anderen Achsen passen sich an diesen Winkel an.
Wie funktioniert's?
- Voraussetzung ist, dass das Fahrzeug mit einer Achsschenkellenkung ausgestattet ist (Also bspw. keine Drehschemel-Lenkung besitzt, bei der die Achse im Gesamten gedreht wird)
- Nachdem der Benutzer ein beliebig vielachsiges Fahrzeug definiert hat, wird im ersten Schritt die "Kurvenlinie" berechnet (Diese muss aus Performancegründen nur einmal berechnet werden, vorausgesetzt, die Anzahl der Achsen ändert sich danach nicht mehr). Die Kurvenlinie ist die Drehachse des Fahrzeugs und muss in drei Fällen anders berechnet werden:
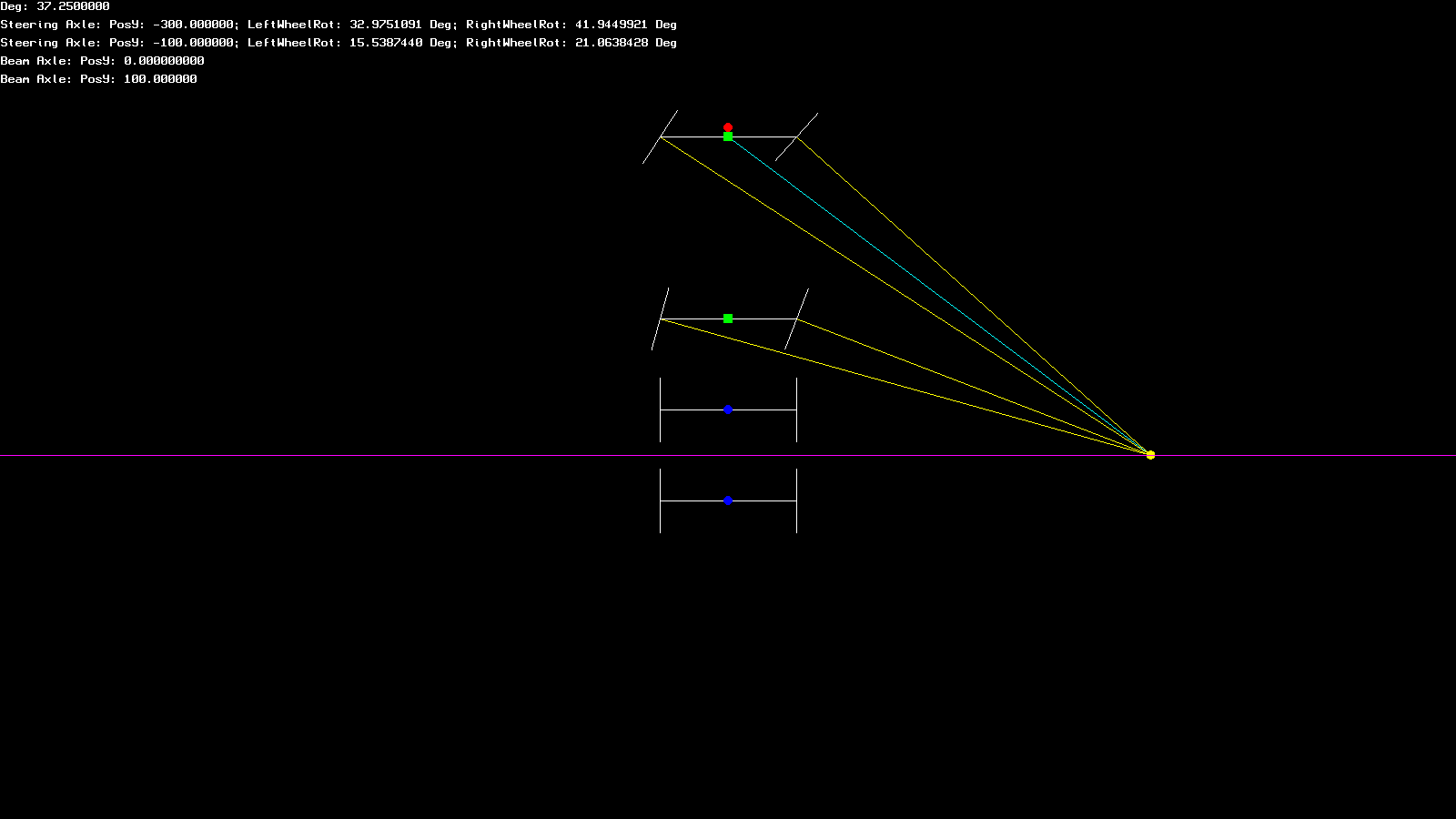
1.) Das Fahrzeug besitzt eine starre Achse und beliebig viele lenkbare Achsen: Hier liegt die Kurvenlinie auf Höhe der starren Achse und verläuft in Achsrichtung.
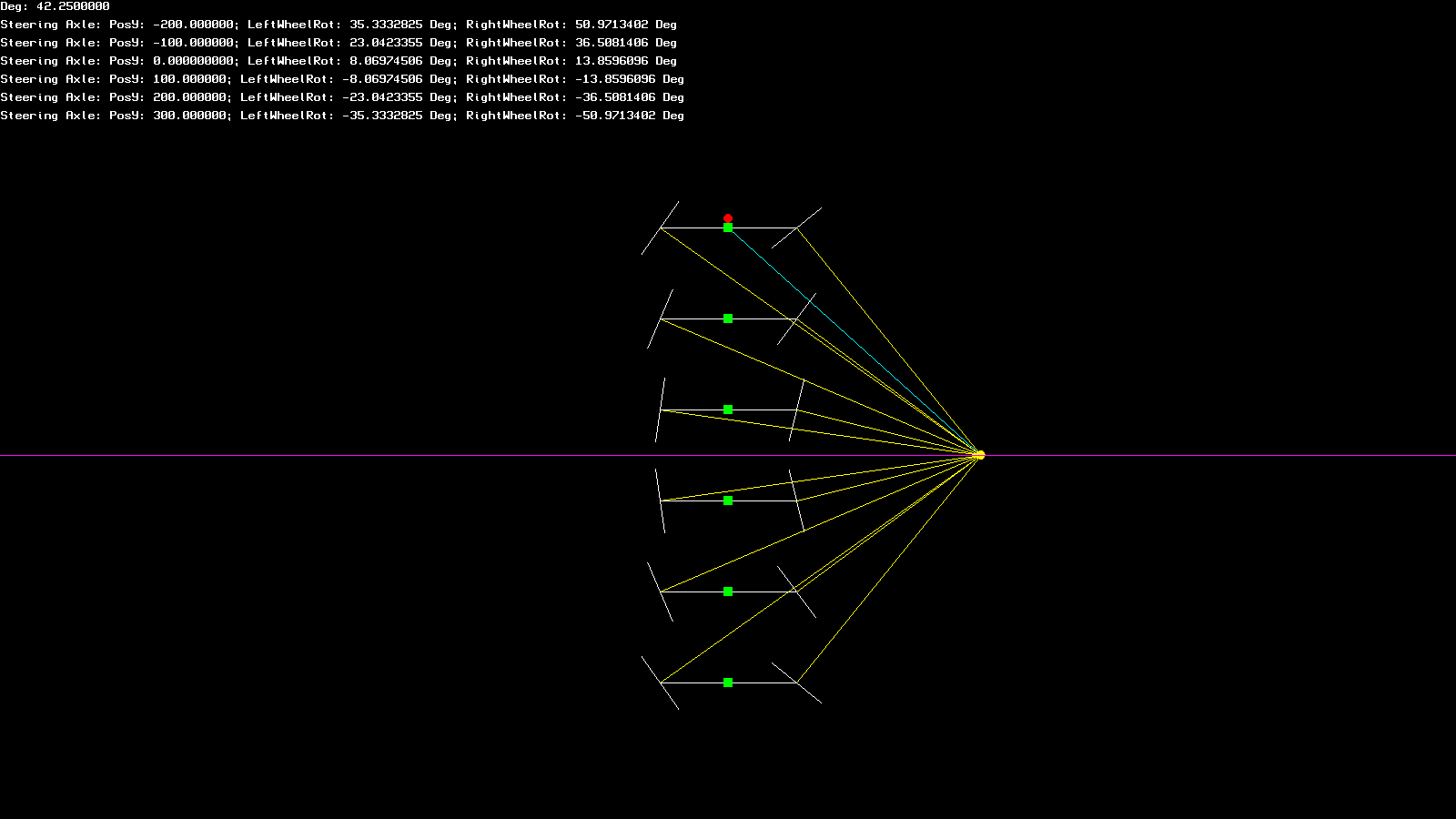
2.) Das Fahrzeug besitzt beliebig viele starre Achsen und beliebig viele lenkbare Achsen: Hier muss zunächst die vorderste starre Achse und die hinterste Starre Achse ermittelt werden. Die Kurvenlinie liegt nun genau in der Mitte dieser beiden Achsen.
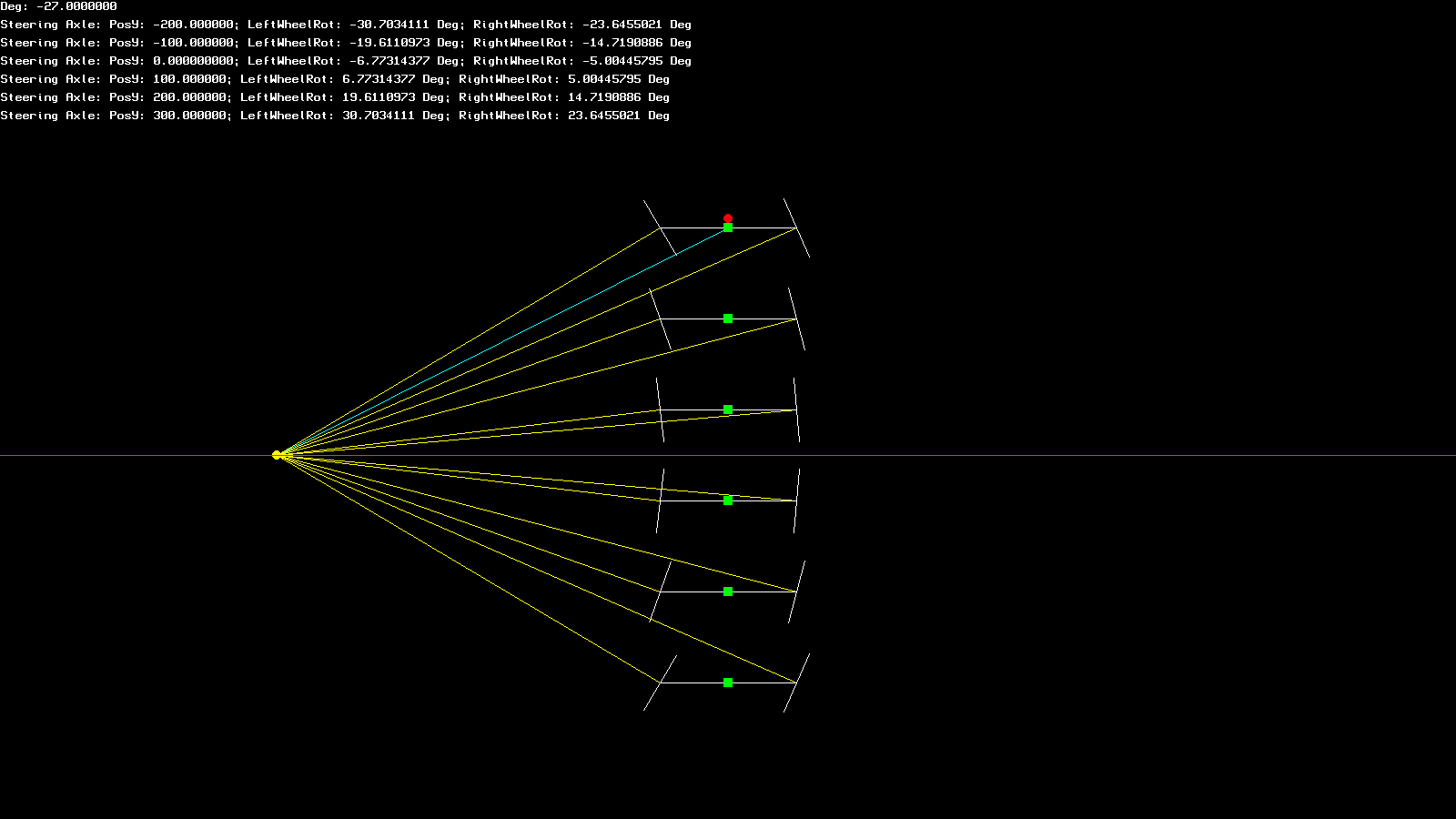
3.) Das Fahrzeug besitzt keine starre Achse und beliebig viele lenkbare Achsen: Hier muss zunächst die vorderste lenkbare Achse und die hinterste lenkbare Achse ermittelt werden. Die Kurvenlinie liegt nun genau in der Mitte dieser beiden Achsen.
- Nachdem die Kurvenachse berechnet wurde, kann nun ein bestimmter Kurvenwinkel angegeben werden. Von der Steuerachse ausgehend wird dann der Schnittpunkt mit der Kurvenlinie ermittelt. Alle lenkbaren Räder des Fahrzeugs werden dann auf diesen Schnittpunkt ausgerichtet.
Screenshots?
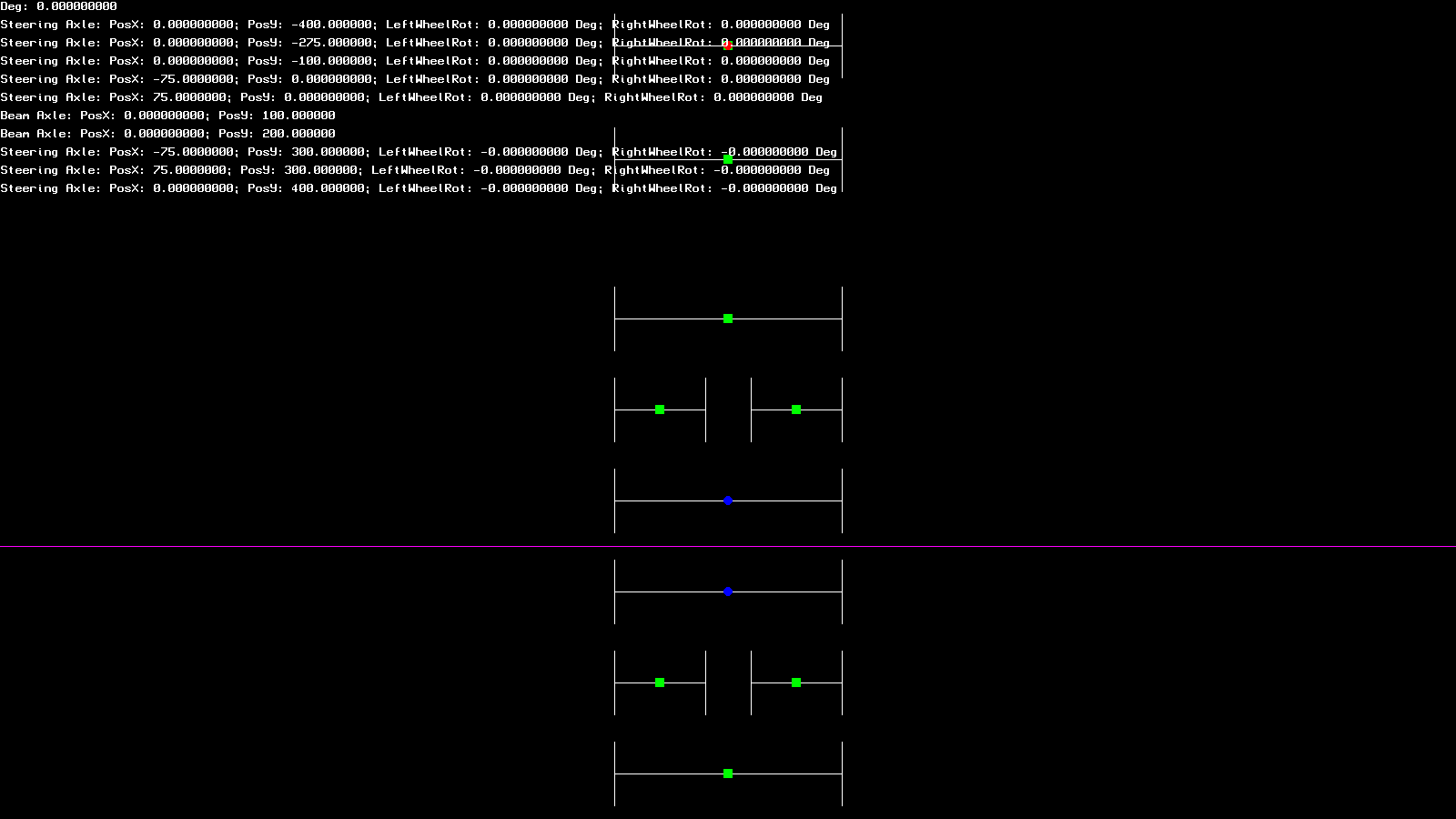
Legende:
- horizontale weiße Linien: Achsen
- vertikale / gedrehte weiße Linien: Räder (und deren Stellung)
- grünes Quadrat auf Achse: lenkbare Achse
- blauer Kreis auf Achse: starre Achse
- roter Kreis auf grünem Quadrat auf Achse: Steuerachse (lenkbare Achse)
- violette horizontale Linie: Kurvenlinie
- gelber Punkt auf Kurvenlinie: Schnittpunkt mit dieser
- türkise Linie: Hypotenuse des zur Berechnung des Schnittpunkts mit der Kurvenlinie erstellten Dreiecks
- gelbe Linie: Hypotenuse des Dreiecks, das vom Radmittelpunkt mit dem ausgerechneten Winkel des betroffenen Rades aufgespannt werden kann.
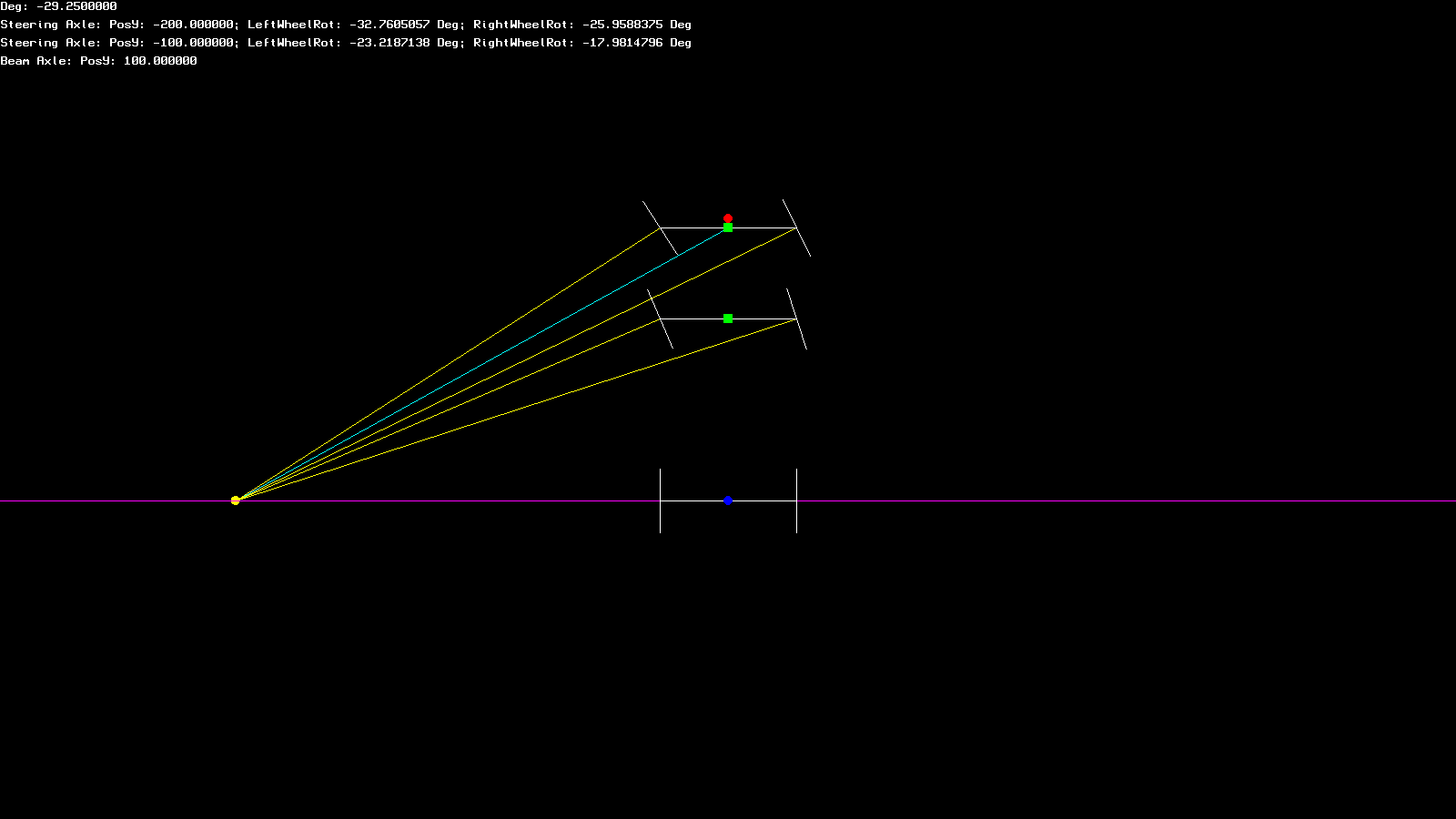
- Fall 1:
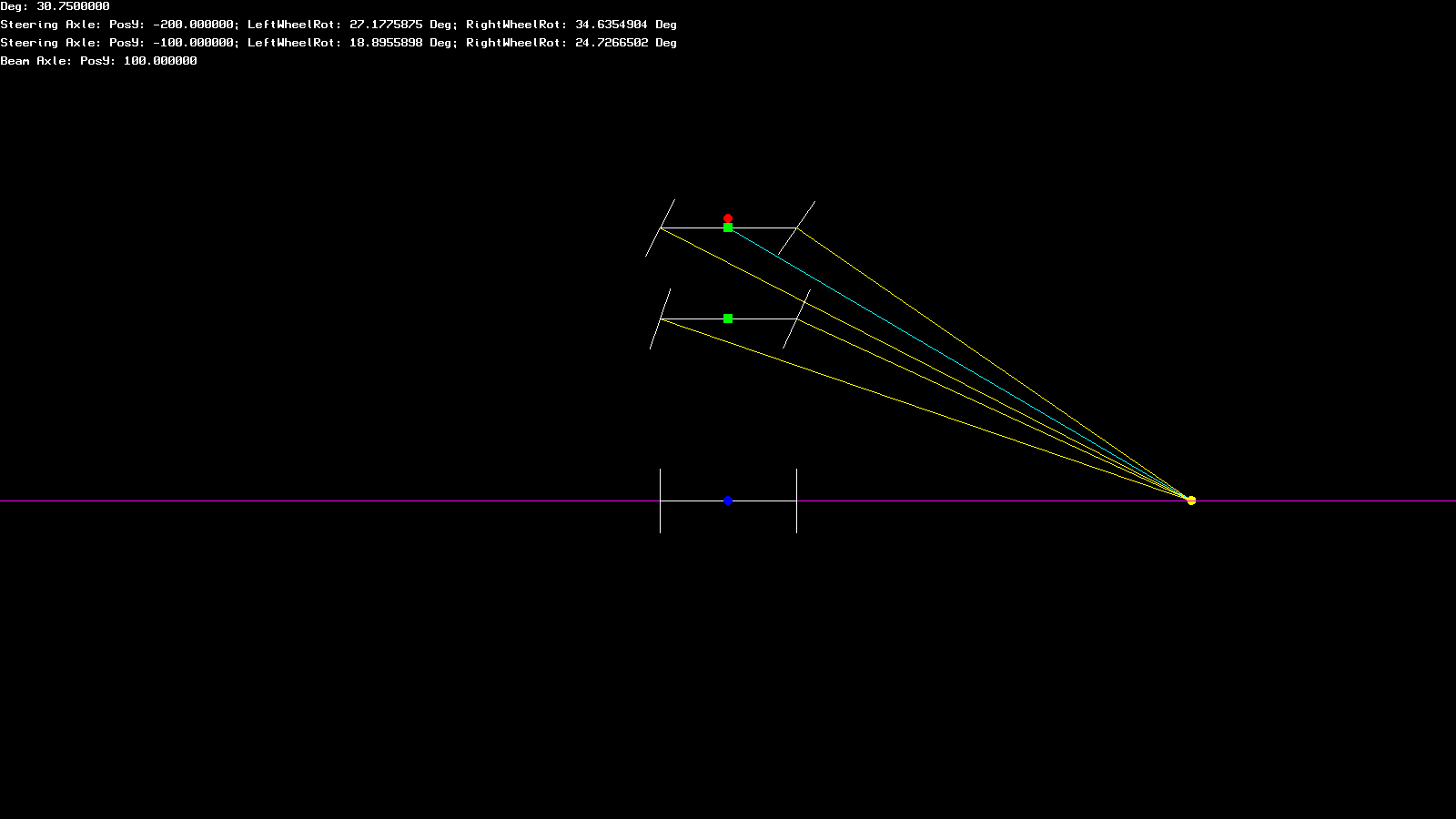
- Fall 2:
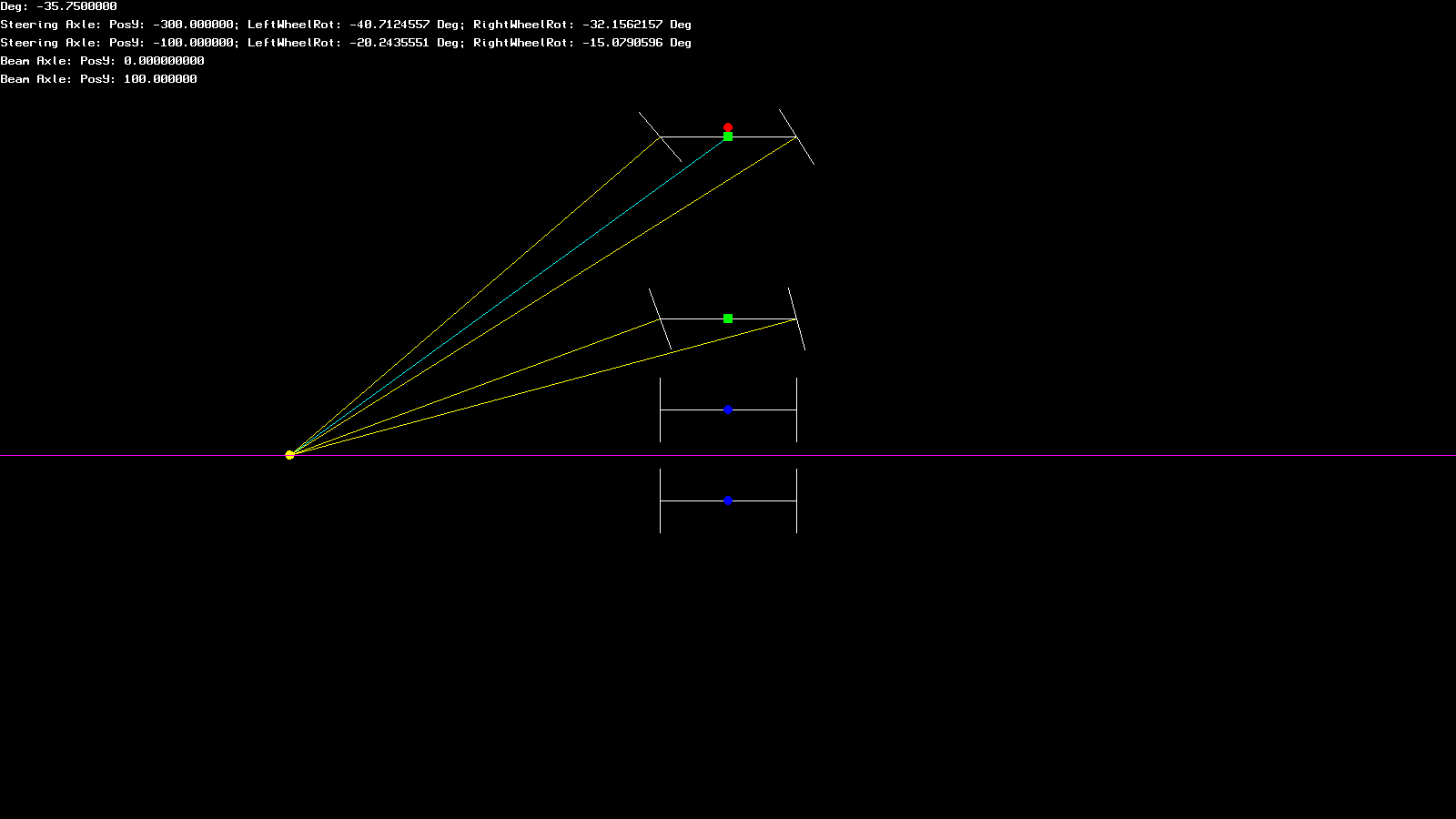
- Fall 3:
- Nachwort?
Vielleicht kann es einer verwenden (ich kann mir nichts wichtigeres in einem Spiel vorstellen, als die korrekten Winkel der Räder zum Kurvenmittelpunkt zu berechnen  ). Spaß beiseite: Falls es jemand benötigt, um physikalische Dinge zu simulieren, oder einfach mal zum rumprobieren, der kann es gerne verwenden. ). Spaß beiseite: Falls es jemand benötigt, um physikalische Dinge zu simulieren, oder einfach mal zum rumprobieren, der kann es gerne verwenden.
- Download?
Da es zu wenig ist, um dafür extra ein RAR-Archiv zu erstellen, etc. hier einfach der Quellcode: BlitzMax: [AUSKLAPPEN] [EINKLAPPEN]
Const WHEEL_SIZE:Float = 50
Const DRAWING_BENCHMARK:Float = 50
Const DRAWING_COLORINTENSITY:Int = 255
Const DRAWING_DRAWCURVELINE:Byte = True
Const DRAWING_DRAWANGLELINES:Byte = True
Const SYS_LEFTWHEEL:Int = 0
Const SYS_RIGHTWHEEL:Int = 1
Type TWheel
Field PosX:Float
Field PosY:Float
Field Size:Float
Field Angle:Float
Function CreateWheel:TWheel(PosX:Float, PosY:Float, Size:Float, Angle:Float)
Local ReturnMe:TWheel = New TWheel
ReturnMe.PosX = PosX
ReturnMe.PosY = PosY
ReturnMe.Size = Size
ReturnMe.Angle = Angle
Return ReturnMe
End Function
Method SetRot(NewRot:Float)
Self.Angle = NewRot
End Method
Method Draw()
Local PrevRot:Float = GetRotation()
SetRotation(Self.Angle)
DrawLine(Self.PosX, Self.PosY, Self.PosX, (Self.PosY - (Self.Size / 2)))
DrawLine(Self.PosX, Self.PosY, Self.PosX, (Self.PosY + (Self.Size / 2)))
SetRotation(PrevRot)
End Method
End Type
Type TAxle
Field PosX:Float
Field PosY:Float
Field TrackWidth:Float
Field Wheels:TWheel[2]
Field IsCtrl:Byte
Method CreateAxle(PosX:Float, PosY:Float, TrackWidth:Float)
Self.PosX = PosX
Self.PosY = PosY
Self.TrackWidth = TrackWidth
End Method
Method Draw() Abstract
Method SetWheelRot(WheelIndex:Int, Rot:Float) Abstract
Method IsSteeringAxle:Byte() Abstract
Method GetMaxWheelRot:Int() Abstract
Method GetMinWheelRot:Int() Abstract
Method DebugOnScreen(PosX:Int, PosY:Int) Abstract
End Type
Type TSteeringAxle Extends TAxle
Field SteerMax:Float
Function CreateSteeringAxle:TSteeringAxle(PosX:Float, PosY:Float, TrackWidth:Float, SteerMax:Float, IsCtrl:Byte = False)
Local ReturnMe:TSteeringAxle = New TSteeringAxle
ReturnMe.CreateAxle(PosX / (100 / DRAWING_BENCHMARK), PosY / (100 / DRAWING_BENCHMARK), TrackWidth / (100 / DRAWING_BENCHMARK))
ReturnMe.SteerMax = SteerMax
ReturnMe.IsCtrl = IsCtrl
ReturnMe.Wheels[SYS_LEFTWHEEL] = TWheel.CreateWheel((ReturnMe.PosX - (ReturnMe.TrackWidth / 2)), ReturnMe.PosY, WHEEL_SIZE / (100 / DRAWING_BENCHMARK), 0)
ReturnMe.Wheels[SYS_RIGHTWHEEL] = TWheel.CreateWheel((ReturnMe.PosX + (ReturnMe.TrackWidth / 2)), ReturnMe.PosY, WHEEL_SIZE / (100 / DRAWING_BENCHMARK), 0)
Return ReturnMe
End Function
Method Draw()
DrawLine(Self.PosX, Self.PosY, (Self.PosX - (Self.TrackWidth / 2)), Self.PosY)
DrawLine(Self.PosX, Self.PosY, (Self.PosX + (Self.TrackWidth / 2)), Self.PosY)
SetColor(0, DRAWING_COLORINTENSITY, 0)
DrawRect((Self.PosX - 5), (Self.PosY - 5), 10, 10)
If(Self.IsCtrl = True)
SetColor(DRAWING_COLORINTENSITY, 0, 0)
DrawOval((Self.PosX - 5), (Self.PosY - 5), 10, 10)
EndIf
SetColor(255, 255, 255)
If(Self.Wheels[SYS_LEFTWHEEL] <> Null) Then Self.Wheels[SYS_LEFTWHEEL].Draw()
If(Self.Wheels[SYS_RIGHTWHEEL] <> Null) Then Self.Wheels[SYS_RIGHTWHEEL].Draw()
End Method
Method SetWheelRot(WheelIndex:Int, Rot:Float)
If(WheelIndex <> 0 And WheelIndex <> 1) Then Return
Self.Wheels[WheelIndex].SetRot(Rot)
End Method
Method DebugOnScreen(PosX:Int, PosY:Int)
DrawText("Steering Axle: PosY: " + Self.PosY + "; LeftWheelRot: " + Self.Wheels[SYS_LEFTWHEEL].Angle + " Deg; RightWheelRot: " + Self.Wheels[SYS_RIGHTWHEEL].Angle + " Deg", PosX, PosY)
End Method
Method GetMaxWheelRot:Int()
Return Self.SteerMax
End Method
Method GetMinWheelRot:Int()
Return -Self.SteerMax
End Method
Method IsSteeringAxle:Byte()
Return True
End Method
End Type
Type TBeamAxle Extends TAxle
Function CreateBeamAxle:TBeamAxle(PosX:Float, PosY:Float, TrackWidth:Float)
Local ReturnMe:TBeamAxle = New TBeamAxle
ReturnMe.CreateAxle(PosX / (100 / DRAWING_BENCHMARK), PosY / (100 / DRAWING_BENCHMARK), TrackWidth / (100 / DRAWING_BENCHMARK))
ReturnMe.Wheels[SYS_LEFTWHEEL] = TWheel.CreateWheel((ReturnMe.PosX - (ReturnMe.TrackWidth / 2)), ReturnMe.PosY, WHEEL_SIZE / (100 / DRAWING_BENCHMARK), 0)
ReturnMe.Wheels[SYS_RIGHTWHEEL] = TWheel.CreateWheel((ReturnMe.PosX + (ReturnMe.TrackWidth / 2)), ReturnMe.PosY, WHEEL_SIZE / (100 / DRAWING_BENCHMARK), 0)
ReturnMe.IsCtrl = False
Return ReturnMe
End Function
Method Draw()
DrawLine(Self.PosX, Self.PosY, (Self.PosX - (Self.TrackWidth / 2)), Self.PosY)
DrawLine(Self.PosX, Self.PosY, (Self.PosX + (Self.TrackWidth / 2)), Self.PosY)
SetColor(0, 0, DRAWING_COLORINTENSITY)
DrawOval((Self.PosX - 5), (Self.PosY - 5), 10, 10)
SetColor(255, 255, 255)
If(Self.Wheels[SYS_LEFTWHEEL] <> Null) Then Self.Wheels[SYS_LEFTWHEEL].Draw()
If(Self.Wheels[SYS_RIGHTWHEEL] <> Null) Then Self.Wheels[SYS_RIGHTWHEEL].Draw()
End Method
Method SetWheelRot(WheelIndex:Int, Rot:Float)
End Method
Method GetMaxWheelRot:Int()
Return 0
End Method
Method GetMinWheelRot:Int()
Return 0
End Method
Method IsSteeringAxle:Byte()
Return False
End Method
Method DebugOnScreen(PosX:Int, PosY:Int)
DrawText("Beam Axle: PosY: " + Self.PosY, PosX, PosY)
End Method
End Type
Type TLASModel
Field Axles:TList
Field CurveLine:Float = 0
Function CreateTLASM:TLASModel()
Local ReturnMe:TLASModel = New TLASModel
ReturnMe.Axles = CreateList()
Return ReturnMe
End Function
Method AddAxle(Axle:TAxle)
If(Axle <> Null)
ListAddLast(Self.Axles, Axle)
EndIf
End Method
Method Draw()
If(DRAWING_DRAWCURVELINE = True)
SetColor(DRAWING_COLORINTENSITY, 0, DRAWING_COLORINTENSITY)
DrawLine(-GraphicsWidth(), Self.CurveLine, GraphicsWidth(), Self.CurveLine)
SetColor(255, 255, 255)
EndIf
For Local x:TAxle = EachIn Self.Axles
x.Draw()
Next
End Method
Method CalculateCurveLine()
Local BeamAxleFound:Byte = False
For Local BeamAxleSearch:TAxle = EachIn Self.Axles
If(BeamAxleSearch.IsSteeringAxle() = False)
BeamAxleFound = True
EndIf
Next
Local MinAxle:TAxle = Null
For Local TempAxle:TAxle = EachIn Self.Axles
If(BeamAxleFound = True)
If(TempAxle.IsSteeringAxle() = False)
If(MinAxle = Null)
MinAxle = TempAxle
Continue
EndIf
If(TempAxle.PosY <= MinAxle.PosY)
MinAxle = TempAxle
EndIf
EndIf
Else
If(MinAxle = Null)
MinAxle = TempAxle
Continue
EndIf
If(TempAxle.PosY <= MinAxle.PosY)
MinAxle = TempAxle
EndIf
EndIf
Next
Local MaxAxle:TAxle = Null
For TempAxle = EachIn Self.Axles
If(BeamAxleFound = True)
If(TempAxle.IsSteeringAxle() = False)
If(MaxAxle = Null)
MaxAxle = TempAxle
Continue
EndIf
If(TempAxle.PosY >= MaxAxle.PosY)
MaxAxle = TempAxle
EndIf
EndIf
Else
If(MaxAxle = Null)
MaxAxle = TempAxle
Continue
EndIf
If(TempAxle.PosY >= MaxAxle.PosY)
MaxAxle = TempAxle
EndIf
EndIf
Next
If(MinAxle <> Null And MaxAxle <> Null)
Self.CurveLine = (MaxAxle.PosY + MinAxle.PosY) / 2
EndIf
End Method
Method SetSteeringRot(Angle:Float)
For Local CtrlAxle:TAxle = EachIn Self.Axles
If(CtrlAxle.IsSteeringAxle() = True)
If(CtrlAxle.IsCtrl = True)
Exit
EndIf
Else
CtrlAxle = Null
EndIf
Next
If(CtrlAxle <> Null)
Local Length:Float = Abs(Self.CurveLine) + Abs(CtrlAxle.PosY)
Local intercept:Float = (Length / Tan(Angle)) - CtrlAxle.PosX
If(DRAWING_DRAWANGLELINES = True)
SetColor(0, DRAWING_COLORINTENSITY, DRAWING_COLORINTENSITY)
DrawLine(CtrlAxle.PosX, CtrlAxle.PosY, intercept, Self.CurveLine)
SetColor(255, 255, 255)
SetColor(DRAWING_COLORINTENSITY, DRAWING_COLORINTENSITY, 0)
DrawOval((intercept - 5), (Self.CurveLine - 5), 10, 10)
SetColor(255, 255, 255)
EndIf
For Local TempAxle:TAxle = EachIn Self.Axles
If(TempAxle.IsSteeringAxle() = True)
Local WheelAngle:Float
Local Distance:Float
Local TempLength:Float
If(TempAxle.PosY > Self.CurveLine)
TempLength = TempAxle.PosY - Self.CurveLine
Else
TempLength = Self.CurveLine - TempAxle.PosY
EndIf
Distance = (intercept - (TempAxle.TrackWidth / 2)) - TempAxle.PosX
WheelAngle = ATan(TempLength / Distance)
If(TempAxle.PosY < Self.CurveLine)
TempAxle.Wheels[SYS_RIGHTWHEEL].SetRot(WheelAngle)
Else
TempAxle.Wheels[SYS_RIGHTWHEEL].SetRot(-WheelAngle)
EndIf
If(DRAWING_DRAWANGLELINES = True)
SetColor(DRAWING_COLORINTENSITY, DRAWING_COLORINTENSITY, 0)
DrawLine(TempAxle.PosX + (TempAxle.TrackWidth / 2), TempAxle.PosY, intercept, Self.CurveLine)
EndIf
Distance = (intercept + (TempAxle.TrackWidth / 2)) - TempAxle.PosX
WheelAngle = ATan(TempLength / Distance)
If(TempAxle.PosY < Self.CurveLine)
TempAxle.Wheels[SYS_LEFTWHEEL].SetRot(WheelAngle)
Else
TempAxle.Wheels[SYS_LEFTWHEEL].SetRot(-WheelAngle)
EndIf
If(DRAWING_DRAWANGLELINES = True)
SetColor(DRAWING_COLORINTENSITY, DRAWING_COLORINTENSITY, 0)
DrawLine((TempAxle.PosX - TempAxle.TrackWidth / 2), TempAxle.PosY, intercept, Self.CurveLine)
EndIf
EndIf
Next
EndIf
End Method
Method DebugOnScreen(PosX:Int, PosY:Int)
Local MomPosY:Int = PosY
For Local TempAxle:TAxle = EachIn Self.Axles
TempAxle.DebugOnScreen(PosX, MomPosY)
MomPosY = MomPosY + 20
Next
End Method
End Type
- Codebeispiele?
Hier mal der Code, mit dem die oben gezeigten Screenshots erstellt wurden:
BlitzMax: [AUSKLAPPEN] [EINKLAPPEN] Graphics(1600, 900, 32, 60)
Global FPS:TTimer = CreateTimer(60)
Global TestModel:TLASModel = TLASModel.CreateTLASM()
TestModel.CalculateCurveLine()
SetOrigin((GraphicsWidth() / 2), (GraphicsHeight() / 2))
Global MomDeg:Float = -45
Global DirectionRight:Byte = False
Repeat
WaitTimer(FPS)
Cls
TestModel.SetSteeringRot(MomDeg)
If(DirectionRight = False)
MomDeg = MomDeg + 0.25
Else
MomDeg = MomDeg - 0.25
EndIf
If(MomDeg > 45 Or MomDeg < -45)
DirectionRight = Not DirectionRight
EndIf
TestModel.Draw()
TestModel.DebugOnScreen(-800, -430)
DrawText("Deg: " + MomDeg, -800, -450)
Flip 0
Until KeyHit(KEY_ESCAPE)
End
Joa, ich glaube das wär's...
EDIT:
-> Kleinen Bug im Code behoben, der u.U. den Winkel einiger Räder falsch berechnete
-> Möglichkeit geschaffen, die Achsen auch auf horizontaler Ebene zu verschieben.
|