Sternenkarte - Verbindungen - Routenplanung
Übersicht

KrischanBetreff: Sternenkarte - Verbindungen - Routenplanung |
Antworten mit Zitat |
|
|---|---|---|
|
Ich bastel gerade an einer 3D Sternenkarte, die sowohl zu Navigation als auch für den interstellaren Raumflug verwendbar sein wird. Allerdings hab ich ein kleines Verständnisproblem mit den Verbindungen zwischen den Sternen.
Mein Ziel ist es, dass man ausgehend von einem Startpunkt (entweder 0,0,0 oder irgendein anderer Stern) alle anderen Sterne erreichen kann, indem man von einem Stern zum nächsten hüpft. Da das Weltall gross ist und der Antrieb des Raumschiffs eine begrenzte Reichweite hat macht es keinen Sinn, jeden Stern mit jedem zu verbinden, da dann schnell mehrere hundert Lichtjahre Distanz zusammenkommen. Meine bisherigen Ansätze waren wie folgt (als Basis verwende ich eine Textdatei mit Koordinaten der nächsten 3.000 Sterne in Nachbarschaft zur Sonne, da die "Normalverteilung" der Sterne im Raum hier realistischer ist als mit RND, Lichtjahre sind Units, davon nehme ich die ersten 1000 Sterne, also die der Sonne am nächsten sind). Zur Verbindung zwischen den Sternen verwende ich eine 3D-Linie, die nur aus einem zusammengestauchtem Triangle besteht (Single Surface). A) Verbinde alles innerhalb X Lichtjahre miteinander - gehe alle Sterne durch und speichere jeweils die Distanzen zu allen anderen Sternen - verbinde jeden Stern mit allen Sternen, sofern die Distanz kleiner als X Lichtjahre ist Leider funktioniert das nur im Rahmen zwischen 6-10 Lichtjahren, darunter sind die Verbindungen kaum zusammenhängend und darüber gibt es viel zu viele Verbindungen untereinander. Bei 10 LJ habe ich bei 1000 Sternen nur 4 "verwaiste", allerdings auch teilweise 15-20 Verbindungen zu Nachbarsternen. So gehts also nicht. 
B) Verbinde nur den nächstgelegenen Stern - gehe alle Sterne durch und prüfe, welcher Stern am nächsten liegt - verbinde den Quell- mit dem Zielstern Das sieht schon nicht schlecht aus, allerdings liegen die Sternkonstellationen untereinander auch recht weit auseinander. Vorteil ist hier, dass die Überprüfung auf den Nachbarstern sehr schnell geht (mit Hilfe dieses Threads im BB-Forum. 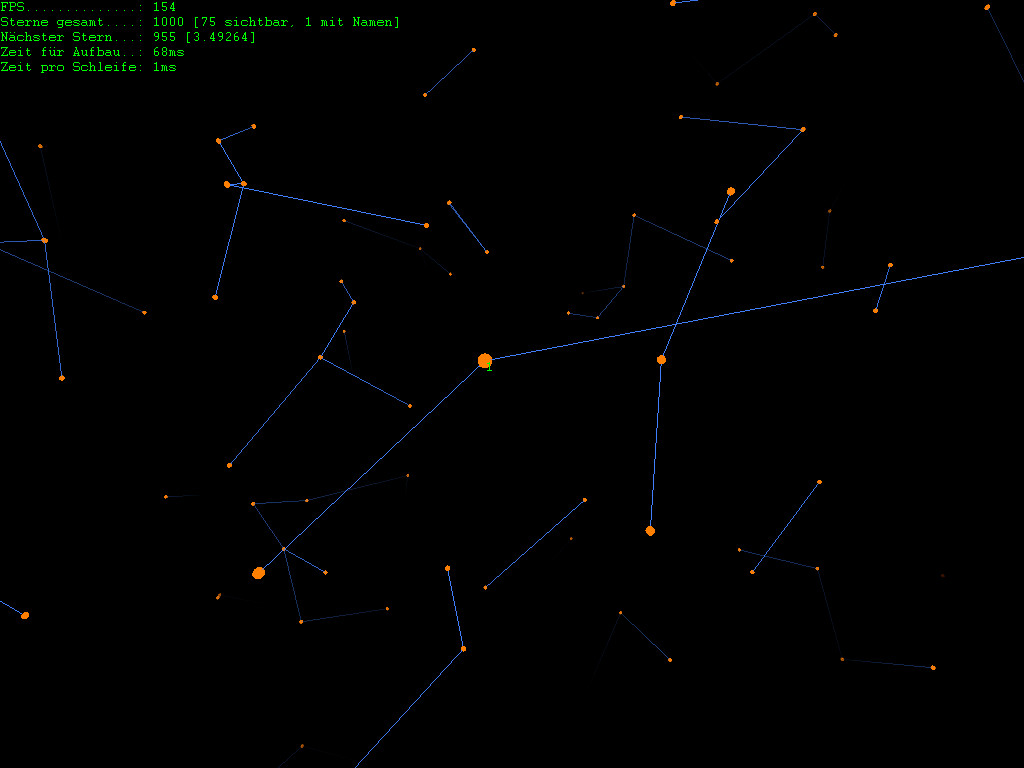
Vermutlich liegt die Lösung in einer Art rekursiven Baumstruktur oder einem Graphen, ausgehend vom Startstern, zumal mit meinen beiden Lösungen Routenplanung mangels Parent/Child-Struktur kaum möglich sein dürfte. Mir schwebt folgendes vor: - Position nahe beliebigem Stern - 3D-Anzeige der Routen von diesem Stern zu seinen Nachbarsternen inkl. Lichtjahre - Routenplaner zu jedem beliebigen Stern, also Waypoints und Auflistung der Abschnitte / Distanzen Wie macht man sowas? Hat sich damit schon einmal jemand beschäftigt? Code kann ich gerne liefern, ist aber im Moment sehr unübersichtlich und unkommentiert. |
||

|
XeresModerator |
Antworten mit Zitat |
|---|---|---|
|
Da das Weltall gross ist und der Antrieb des Raumschiffs eine begrenzte Reichweite hat macht es keinen Sinn, jeden Stern mit jedem zu verbinden, da dann schnell mehrere hundert Lichtjahre Distanz zusammenkommen.
Warum sollte man überhaupt Sterne miteinander Verbinden? Das macht nur dann Sinn, wenn dies Wirtschaftlich oder Politische wichtige Routen darstellt. Um zu einem bestimmten Stern über mehrere Stationen zu kommen, könnte man alle Sterne in Reichweite überprüfen und den Stern, der am ehesten in die Richtung des Zielsterns zeigt, ansteuern. |
||
|
Win10 Prof.(x64)/Ubuntu 16.04|CPU 4x3Ghz (Intel i5-4590S)|RAM 8 GB|GeForce GTX 960
Wie man Fragen richtig stellt || "Es geht nicht" || Video-Tutorial: Sinus & Cosinus THERE IS NO FAIR. THERE IS NO JUSTICE. THERE IS JUST ME. (Death, Discworld) |
||
Krischan |
Antworten mit Zitat |
|
|---|---|---|
|
Zum einen bekommt man mit den Linien eine schnell erfassbare visuelle Struktur in die Punktwolke, da später weit entfernte Sterne mit grösserer Leuchtkraft genauso gross erscheinen werden wie nahe mit niedriger Leuchtkraft (also wie nachts am Himmel). Zum anderen soll nicht jeder Stern mit allen möglichen Nachbarsternen verbunden sein, da bestimmte Routen z.B. durch Nebulae oder sonstige Hindernisse unmöglich mit interstellarem Antrieb erreichbar sind (man also einen Umweg fliegen muss). Wenn die Sterne unterschiedlich weit weg sind, sagen wir im Schnitt sind es 5-6 Lichtjahre und der Anfangsantrieb kann nur so weit, kann man andere Systeme, die weiter entfernt sind, erst später erreichen, wenn man einen Antrieb mit grösserer Reichweite eingebaut hat.
Es gibt viele Möglichkeiten das darzustellen, ich möchte es halt gerne so wie beschrieben haben. Nur wie macht man das am Besten? Simples Beispiel: 
Das finde ich sehr übersichtlich gelöst. Aber auch das ist nicht perfekt. In Eve im XXL-Format sieht das dann so aus: http://steamreview.org/wp-cont...tarmap.jpg |
||
- Zuletzt bearbeitet von Krischan am Do, Jan 22, 2009 22:54, insgesamt einmal bearbeitet

|
Firstdeathmaker |
Antworten mit Zitat |
|---|---|---|
|
Habe ich das richtig verstanden, du willst ein Zusammenhängendes System haben?
Versuch es doch mal damit: http://de.wikipedia.org/wiki/Spannbaum eventuell einfach eine Handvoll "wichtige" Planeten raussuchen, den Algorithmus für diese Planeten ausführen und dann alle gefundenen minimalen Spannbäume miteinander vereinigen. Dadurch bekommt man die jeweils kürzesten Routen von diesen Planeten zu allen anderen (was ja irgendwie für wichtige Welten bzw. Städte auch zutrifft). |
||
|
www.illusion-games.de
Space War 3 | Space Race | Galaxy on Fire | Razoon Gewinner des BCC #57 User posted image |
||
Krischan |
Antworten mit Zitat |
|
|---|---|---|
|
Ja das sieht gut aus. Mit dem Dijkstra-Algorithmus hatte ich mich schon beschäftigt, das war mir aber zu hoch. Der Prim- bzw. Kruskal-Algorithmus hingegen sieht gut aus. Wenn ich das richtig verstanden habe, kann man mit dem Prim- bzw. Kruskal-Algorithmus die Struktur erstellen und dann mittels Dijkstra-Algorithmus den kürzesten Pfad herausfinden. Ich bekomme es aber irgendwie nicht in BB gebacken und finde im Netz nur (für mich) unleserliche C++ Codes (da kann man mal wieder sehen, WIE einfach Blitzbasic ist, das kann eigentlich jeder sofort lesen und verstehen).
Mal etwas von meinem BB-Code (nicht lauffähig, zur Veranschaulichung): Code: [AUSKLAPPEN] max%=1000
Dim distances#(max,max) Type star Field id% Field entity% Field x#,y#,z# End Type For i=1 to max s.star = New star stars=stars+1 s1\x=rnd(-100,100) s1\y=rnd(-100,100) s1\z=rnd(-100,100) s1\entity=CreateCube() s1\id=stars Next For s1.star = Each star id1=id1+1 For s2.star = Each star id2=id2+1 If distances(id1,id2)=0 Or distances(id2,id1)=0 Then d#=EntityDistance(s1\entity,s2\entity) distances(id1,id2)=d distances(id2,id1)=d EndIf Next id2=0 Next So sieht ganz grob mein Testcode aus. Es werden 1000 Punkte zufällig plaziert und im Array "distances" die Entfernungen jedes Sterns zu jedem Stern festgehalten, so wie in einer Entfernungstabelle in Autoatlanten zwischen allen Städten. Auf dieser Webseite finde ich folgendes: Algorithmus von Prim Wähle einen speziellen Ort aus und nenne ihn erreichbar. Alle anderen Orte sind zunächst nicht erreichbar. Führe den folgenden Schritt so oft aus, bis alle Orte erreichbar sind: Baue die kürzeste Brücke zwischen zwei Orten, von denen einer erreichbar und der andere nicht erreichbar ist, und nenne den bislang nicht erreichbaren Ort erreichbar. Algorithmus von Kruskal Führe den folgenden Schritt so oft aus, bis alle Orte untereinander durch Brücken verbunden sind: Baue die kürzeste Brücke, die zwei Orte verbindet, die bislang nicht voneinander aus erreichbar sind. Ich habe ein paar Versuche gestartet, aber irgendwie will das nicht so. Vielleicht war der Tag auch einfach zu lang Die Linien zeichne ich übrigens mit diesem Code: [AUSKLAPPEN] Function create_3D_line(mesh,x0#,y0#,z0#,x1#,y1#,z1#,r%=255,g%=255,b%=255)
If mesh = 0 mesh = CreateMesh() surf = CreateSurface(mesh) EntityFX mesh,1+2+16 Else last_surf = CountSurfaces(mesh) surf = GetSurface(mesh,last_surf) If CountVertices(surf) > 30000 Then surf = CreateSurface(mesh) End If v1 = AddVertex(surf,x1,y1,z1) v2 = AddVertex(surf,x0,y0,z0) AddTriangle surf,v1,v1,v2 VertexColor surf,v1,r,g,b,1 VertexColor surf,v2,r,g,b,1 Return mesh End Function |
||
|
|
Firstdeathmaker |
Antworten mit Zitat |
|---|---|---|
|
Ich schau mal, ich schreib dir da mal was, weis aber noch nicht wann es fertig wird, da ich heute noch viel zu tun hab Aber Grundsätzlich brauchst du schonmal 2 Datentypen: (Dein Star-Type) Code: [AUSKLAPPEN] Type TNode
field id% field pos#[3] end type (Verbindung zwischen den Stars) Code: [AUSKLAPPEN] Type TLink
field n.TNode[2] field distance# end type Dann erstellst du erstmal alle Verbindungen, allerdings keine doppelten. Sprich wenn du eine Verbindung von Star1->Star2 hast, brauchst du nicht noch eine weitere Verbindung von Star2->Star1. Dadurch reduzierst du die Anzahl der Verbindungen schonmal extrem, und die Verbindungen würden somit ungerichteten Verbindungen entsprechen (= in beiden Richtungen geltend). (zum berechnen der wirklichen Anzahl an benötigten Verbindungen damit du dafür ein Array erstellen kannst) Code: [AUSKLAPPEN] Global STARS% = 1000
Global CONNECTIONS% = (STARS*(STARS+1)/2) - STARS Am besten programmierst du dir dann eine Funktion, über welche du schnell die entsprechenden Verbindungen finden kannst. Müsste also so aussehen: Function getLink.TLink(node1%,node2%) (Bis hierhin bin ich bisher gekommen). Jetzt hast du schonmal ein gutes Datengerüst um an die Algorithmen ranzugehen. |
||
|
www.illusion-games.de
Space War 3 | Space Race | Galaxy on Fire | Razoon Gewinner des BCC #57 User posted image |
||
|
|
Firstdeathmaker |
Antworten mit Zitat |
|---|---|---|
|
Okay, fertig. War nen Haufen Arbeit, aber es funktioniert.
Das Prinzip: Ich erstelle alle Nodes (= Planeten oder Sterne) und alle Connections (=Verbindungen) welche es geben kann. Die Connections packe ich in ein großes Array. Da ich nicht Nodes*Nodes Connections habe (da ich keine Verbindungen in beide Richtungen brauche und auch keine auf den selben Planeten) muss ich die Position einer Verbindung im Array durch TConnection_getArrayPos%(n1%,n2%) berechnen. n1 und n2 stehen dabei für node\id's. Die erstellten Verbindungen packe ich zugleich direkt in die QuickSortQueue. Nachdem alle erstellt worden sind, kann ich diese dann per TQuicksort_sort() sortieren, was viel schneller geht als wenn ich sie beim erstellen in einer Liste einordne. Die QuickSortQueue.bb habe ich unten auch gepostet, sie ist variabel einsetzbar, immer wenn man objekte sortieren möchte. Nun ja, dann kommt der eigentliche Spannbaum-Algorithmus. Habe mich dabei für den Prim-Algorithmus entschieden, weil der hier einfacher zu implementieren war (geht trotzdem recht fix, schneller als das sortieren auf jeden Fall). Das löschen der überflüssigen Verbindungen am Schluss ist am aufwendigsten, vielleicht liegt das an der langsamen Positionsberechnung? Vielleicht fällt ja jmd ein wie man die Funktion Code: [AUSKLAPPEN] Function TConnection_getArrayPos%(n1%,n2%)
Local na% = minInt(n1,n2) Local nb% = maxInt(n1,n2) Local pos% = 0 For i% = 1 To na pos = pos + Sgn((na-i)) * (NODES - i) Next pos = pos + (nb-na) - 1 Return pos End Function beschleunigen kann? Muss irgendwie mit dem kleinen Gauss zusammen hängen, aber mir ist einfach nix eingefallen... Naja, am Ende hast du jedenfalls nach dem Aufruf der Funktion TConnection_CreateSpanningTree(startNode.TNode) nur noch Verbindungen übrig, welche alle Nodes/Planeten miteinander verbinden. Und dass alles auf kürzestem Weg zum StartNode. Test.bb Code: [AUSKLAPPEN] Include "Spannbaum.bb"
TNode_InitAll() TConnection_InitAll() TConnection_CreateSpanningTree(First TNode) WaitKey() End Spannbaum.bb Code: [AUSKLAPPEN] Include "QuickSortQueue.bb"
Global NODES%=500 Global NODES_XDIST# = 100 / 2 Global NODES_YDIST# = 100 / 2 Global NODES_ZDIST# = 100 / 2 Dim NODE_ARRAY.TNode(NODES) Type TNode Field id% Field entity% Field pos#[3] Field connected% End Type Type TConnection Field node.TNode[2] Field dist# End Type Global CONNECTIONS% = TConnection_calcConnCount%() Dim CONNECTION_ARRAY.TConnection(CONNECTIONS) Function TConnection_calcConnCount%() Return (NODES*(NODES+1)/2) - NODES; See http://de.wikipedia.org/wiki/Der_kleine_Gau%C3%9F End Function Function minInt(c1%,c2%) If c1<=c2 Return c1 Return c2 End Function Function maxInt(c1%,c2%) If c1>=c2 Return c1 Return c2 End Function Function TConnection_getConnection.TConnection(n1%,n2%) If n1=n2 Return Null Return CONNECTION_ARRAY(TConnection_getArrayPos(n1,n2)) End Function Function TConnection_getArrayPos%(n1%,n2%) Local na% = minInt(n1,n2) Local nb% = maxInt(n1,n2) Local pos% = 0 For i% = 1 To na pos = pos + Sgn((na-i)) * (NODES - i) Next pos = pos + (nb-na) - 1 Return pos End Function Function TConnection_getConnectionTest() For i% = 5000 To 5005 Local c2.TConnection = TConnection_getConnection((i/1000)+1,(i Mod 1000)+1) If c2<>Null Print ((i/1000)+1)+"/"+((i Mod 1000)+1) + " = "+c2\node[0]\id + "/"+c2\node[1]\id EndIf Next End Function Function TNode_InitAll() DebugLog "Init Nodes" For i% = 1 To NODES Local n.TNode = New TNode n\id = i n\pos[0] = Rnd(-NODES_XDIST,NODES_XDIST) n\pos[1] = Rnd(-NODES_YDIST,NODES_YDIST) n\pos[2] = Rnd(-NODES_ZDIST,NODES_ZDIST) NODE_ARRAY(i-1) = n Next End Function Function TConnection_Create.TConnection(n1.TNode,n2.TNode) Local c.TConnection = New TConnection c\node[0] = n1 c\node[1] = n2 c\dist = Sqr((n1\pos[0]-n2\pos[0])*(n1\pos[0]-n2\pos[0])+(n1\pos[1]-n2\pos[1])*(n1\pos[1]-n2\pos[1])+(n1\pos[2]-n2\pos[2])*(n1\pos[2]-n2\pos[2])) Return c End Function Function TConnection_InitAll() DebugLog "Init Connections" Local stmp% = NODES-1 Local c% = 0 TQuicksort_Clear() For i1% = 0 To stmp For i2% = i1 To stmp If i1<>i2 CONNECTION_ARRAY(c) = TConnection_Create(NODE_ARRAY(i1),NODE_ARRAY(i2)) TQuicksortLink_create.TQuicksortLink(CONNECTION_ARRAY(c)\dist,Handle(CONNECTION_ARRAY(c))) c = c + 1 EndIf Next Next DebugLog "sorting connections: ..." TQuicksort_sort() DebugLog "sorting connections: finished" End Function Function TConnection_CreateSpanningTree(startNode.TNode) DebugLog "calculating min spanning tree" startNode\connected = True For i% = 1 To NODES TConnection_CreateSpanningTree_Sub() Next DebugLog "cleaning up" For qsl.TQuicksortLink = Each TQuicksortLink Local c.TConnection = Object.TConnection(qsl\objHandle) If c\node[0]\connected And c\node[1]\connected Local pos% = TConnection_getArrayPos%(c\node[0]\id,c\node[1]\id) If CONNECTION_ARRAY(pos)<>Null Delete CONNECTION_ARRAY(pos) CONNECTION_ARRAY(pos) = Null EndIf Next TQuickSort_clear() DebugLog "finished calc spanning tree" For c.TConnection = Each TConnection DebugLog "c "+c\node[0]\id+" <--> "+c\node[1]\id+" dist:"+c\dist Next End Function Function TConnection_CreateSpanningTree_Sub() ;Kleinste Kante wählen die Graph mit noch nicht verb. Knoten verbindet. For qsl.TQuicksortLink = Each TQuicksortLink Local c.TConnection = Object.TConnection(qsl\objHandle) If c\node[0]\connected Xor c\node[1]\connected c\node[0]\connected = True c\node[1]\connected = True Delete qsl Return EndIf Next End Function QuickSortQueue.bb Code: [AUSKLAPPEN] Type TQuicksortLink Field value# Field objHandle% End Type Function TQuicksortLink_create.TQuicksortLink(value#,objectHandle%) Local pl.TQuicksortLink = New TQuicksortLink pl\value = value pl\objHandle = objectHandle Return pl End Function Function TQuicksortLink_removeFirst%() Local l.TQuicksortLink = First TQuicksortLink If l<>Null Local h% = l\objHandle Delete l Return h EndIf End Function Function TQuicksortLink_removeLast%() Local l.TQuicksortLink = Last TQuicksortLink If l<>Null Local h% = l\objHandle Delete l Return h EndIf End Function Function TQuicksort_clear() For ql.TQuicksortLink = Each TQuicksortLink Delete ql Next End Function Function TQuicksort_sort() TQuicksort_sortPart(First TQuicksortLink,Last TQuicksortLink) End Function Function TQuicksort_sortPart(f.TQuicksortLink,l.TQuicksortLink) If f = l Return If l = Null Return If f = Null Return p.TQuicksortLink = f e.TQuicksortLink = l ;p = pivot element this.TQuicksortLink = f enum.TQuicksortLink = After this While this<>e And enum<>Null this = enum enum = After enum If this\value < p\value Insert this Before f f = this Else Insert this After l l = this EndIf Wend TQuicksort_sortPart(f,p) TQuicksort_sortPart(After p,l) End Function |
||
|
www.illusion-games.de
Space War 3 | Space Race | Galaxy on Fire | Razoon Gewinner des BCC #57 User posted image |
||
Krischan |
Antworten mit Zitat |
|
|---|---|---|
|
Sorry dass ich mich erst jetzt melde, musste erst mal mein neues Notebook einrichten. Da hast Du Dir ja eine ganz schöne Arbeit mit gemacht, auch noch objektorientiert a) die Sterne ab einem definierten Parent aus mit meiner Line3D Funktion verbinden soll b) von einem Stern X die kürzeste Strecke zu einem Stern Y durchlaufen kann (z.B. Start bei ID 5, über 7,13,27,40 zu ID 49) Ich habe es bislang nur geschafft, die Sterne anzuzeigen, das war aber kein Hexenwerk. Kannst Du das noch beschreiben bzw. mein Beispiel dahingehend erweitern, so dass ich da als Otto Normalprogrammierer was mit anfangen kann? Code: [AUSKLAPPEN] Include "Spannbaum.bb"
Global movespeed#=0.5 ms=MilliSecs() TNode_InitAll() TConnection_InitAll() TConnection_CreateSpanningTree(First TNode) Graphics3D 800,600,32,2 ; Entities cam=CreateCamera() wiref_piv = CreatePivot() solid_piv = CreatePivot() stern=CreateSphere(8) ; Sterne erzeugen For n.TNode = Each TNode n\entity=CopyEntity(stern,solid_piv) PositionEntity n\entity,n\pos[0],n\pos[1],n\pos[2] ScaleEntity n\entity,0.25,0.25,0.25 Next ende=MilliSecs()-ms While Not KeyHit(1) ; FPS messung FPS_C=FPS_C+1 : If ms<MilliSecs() Then ms=MilliSecs()+1000 : FPS=FPS_C : FPS_C=0 ; Frame tweening Tween#=Float(MilliSecs()-FrameTime)/Float(20.0) : FrameTime=MilliSecs() ; Maussteuerung mxs#=MouseXSpeed() : mys#=MouseYSpeed() : pitch#=EntityPitch(cam)+(mys#/5) If pitch>89 Then pitch=89 Else If pitch<-89 Then pitch=-89 RotateEntity cam,pitch,EntityYaw(cam)-(mxs#/5),0 MoveMouse GraphicsWidth()/2,GraphicsHeight()/2 ; Tastatursteuerung If KeyDown(200) Then MoveEntity cam,0,0,movespeed*tween If KeyDown(208) Then MoveEntity cam,0,0,-movespeed*tween If KeyDown(205) Then MoveEntity cam,movespeed*tween,0,0 If KeyDown(203) Then MoveEntity cam,-movespeed*tween,0,0 If KeyHit(57) Then wf=1-wf ; Render wireframe objects. WireFrame 1 : ShowEntity wiref_piv : HideEntity solid_piv CameraClsMode cam,1,1 : RenderWorld ; Render solid objects. WireFrame wf : HideEntity wiref_piv : ShowEntity solid_piv CameraClsMode cam,0,0 : RenderWorld ; Textausgabe Text 0, 0,"FPS...............: "+FPS Text 0,15,"Baum erstellt in..: "+ende+"ms" RenderWorld Flip 0 Wend End ; 3D Linie zeichnen Function Line3D(mesh,x0#,y0#,z0#,x1#,y1#,z1#,r%=255,g%=255,b%=255) If mesh = 0 mesh = CreateMesh() surf = CreateSurface(mesh) EntityFX mesh,1+2+16 Else last_surf = CountSurfaces(mesh) surf = GetSurface(mesh,last_surf) If CountVertices(surf) > 30000 Then surf = CreateSurface(mesh) End If v1 = AddVertex(surf,x1,y1,z1) v2 = AddVertex(surf,x0,y0,z0) AddTriangle surf,v1,v1,v2 VertexColor surf,v1,r,g,b,1 VertexColor surf,v2,r,g,b,1 Return mesh End Function Im Internet hatte ich noch ein Beispiel für den Dijkstra-Algorithmus in PHP gefunden, evt. haben die das simpler gelöst, auch schwer objektorientiert gelöst (hab aber noch keine Zeit gehabt, den Code auseinanderzunehmen): demo.dijkstra.php Code: [AUSKLAPPEN] <?php
include("class.dijkstra.php"); // I is the infinite distance. define('I',1000); // Size of the matrix $matrixWidth = 20; // $points is an array in the following format: (router1,router2,distance-between-them) $points = array( array(0,1,4), array(0,2,I), array(1,2,5), array(1,3,5), array(2,3,5), array(3,4,5), array(4,5,5), array(4,5,5), array(2,10,30), array(2,11,40), array(5,19,20), array(10,11,20), array(12,13,20), ); $ourMap = array(); // Read in the points and push them into the map for ($i=0,$m=count($points); $i<$m; $i++) { $x = $points[$i][0]; $y = $points[$i][1]; $c = $points[$i][2]; $ourMap[$x][$y] = $c; $ourMap[$y][$x] = $c; } // ensure that the distance from a node to itself is always zero // Purists may want to edit this bit out. for ($i=0; $i < $matrixWidth; $i++) { for ($k=0; $k < $matrixWidth; $k++) { if ($i == $k) $ourMap[$i][$k] = 0; } } // initialize the algorithm class $dijkstra = new Dijkstra($ourMap, I,$matrixWidth); // $dijkstra->findShortestPath(0,13); to find only path from field 0 to field 13... $dijkstra->findShortestPath(0); // Display the results echo '<pre>'; echo "the map looks like:\n\n"; echo $dijkstra -> printMap($ourMap); echo "\n\nthe shortest paths from point 0:\n"; echo $dijkstra -> getResults(); echo '</pre>'; ?> class.dijkstra.php Code: [AUSKLAPPEN] <?PHP
class Dijkstra { var $visited = array(); var $distance = array(); var $previousNode = array(); var $startnode =null; var $map = array(); var $infiniteDistance = 0; var $bestPath = 0; var $matrixWidth = 0; function Dijkstra(&$ourMap, $infiniteDistance) { $this -> infiniteDistance = $infiniteDistance; $this -> map = &$ourMap; $this -> bestPath = 0; } function findShortestPath($start,$to = null) { $this -> startnode = $start; foreach (array_keys($this->map) as $i) { if ($i == $this -> startnode) { $this -> visited[$i] = true; $this -> distance[$i] = 0; } else { $this -> visited[$i] = false; $this -> distance[$i] = isset($this -> map[$this -> startnode][$i]) ? $this -> map[$this -> startnode][$i] : $this -> infiniteDistance; } $this -> previousNode[$i] = $this -> startnode; } $maxTries = count($this->map); $tries = 0; while (in_array(false,$this -> visited,true) && $tries <= $maxTries) { $this -> bestPath = $this->findBestPath($this->distance,array_keys($this -> visited,false,true)); if($to !== null && $this -> bestPath === $to) { break; } $this -> updateDistanceAndPrevious($this -> bestPath); $this -> visited[$this -> bestPath] = true; $tries++; } } function findBestPath($ourDistance, $ourNodesLeft) { $bestPath = $this -> infiniteDistance; $bestNode = 0; for ($i = 0,$m=count($ourNodesLeft); $i < $m; $i++) { if($ourDistance[$ourNodesLeft[$i]] < $bestPath) { $bestPath = $ourDistance[$ourNodesLeft[$i]]; $bestNode = $ourNodesLeft[$i]; } } return $bestNode; } function updateDistanceAndPrevious($obp) { foreach (array_keys($this->map) as $i) { if( (isset($this->map[$obp][$i])) && (!($this->map[$obp][$i] == $this->infiniteDistance) || ($this->map[$obp][$i] == 0 )) && (($this->distance[$obp] + $this->map[$obp][$i]) < $this -> distance[$i]) ) { $this -> distance[$i] = $this -> distance[$obp] + $this -> map[$obp][$i]; $this -> previousNode[$i] = $obp; } } } function printMap(&$map) { $placeholder = ' %' . strlen($this -> infiniteDistance) .'d'; $foo = ''; for($i=0,$im=count($map);$i<$im;$i++) { for ($k=0,$m=$im;$k<$m;$k++) { $foo.= sprintf($placeholder, isset($map[$i][$k]) ? $map[$i][$k] : $this -> infiniteDistance); } $foo.= "\n"; } return $foo; } function getResults($to = null) { $ourShortestPath = array(); $foo = ''; foreach (array_keys($this->map) as $i) { if($to !== null && $to !== $i) { continue; } $ourShortestPath[$i] = array(); $endNode = null; $currNode = $i; $ourShortestPath[$i][] = $i; while ($endNode === null || $endNode != $this -> startnode) { $ourShortestPath[$i][] = $this -> previousNode[$currNode]; $endNode = $this -> previousNode[$currNode]; $currNode = $this -> previousNode[$currNode]; } $ourShortestPath[$i] = array_reverse($ourShortestPath[$i]); if ($to === null || $to === $i) { if($this -> distance[$i] >= $this -> infiniteDistance) { $foo .= sprintf("no route from %d to %d. \n",$this -> startnode,$i); } else { $foo .= sprintf('%d => %d = %d [%d]: (%s).'."\n" , $this -> startnode,$i,$this -> distance[$i], count($ourShortestPath[$i]), implode('-',$ourShortestPath[$i])); } $foo .= str_repeat('-',20) . "\n"; if ($to === $i) { break; } } } return $foo; } } // end class ?> |
||
|
|
Firstdeathmaker |
Antworten mit Zitat |
|---|---|---|
|
Zitat: a) die Sterne ab einem definierten Parent aus mit meiner Line3D Funktion verbinden
Naja, dein "definiertes Parent" ist ja ein Stern, oder? Ich habe hier nochmal einen modifizierten Code für Spannbaum.bb angehängt sowie deinen Code (Test2.bb) leicht modifiziert, sodass die Verbindungen angezeigt werden. Jetzt werden die Verbindungen nicht gelöscht, sondern einfach nur alle gültigen restlichen Verbindungen in das Array Dim CurrentConnectionsArray.TConnection(NODES-1) geschrieben. Ein Aufruf von TConnection_CreateSpanningTree(n.TNode) schreibt also alle gültigen Verbindungen in das Array CurrentConnectionsArray. Dieses kann man dann durchgehen und die entsprechenden Linien einzeichnen. Im Type TConnection habe ich zudem eine variable "valid" eingeführt, diese wird gesetzt, wenn die Verbindung eben eine der gefundenen ist (das wird bei Frage b) wichtig). Achtung: Der Algorithmus erstellt wirklich nur einen minimalen Spannbaum. D.h. es werden nicht immer die kürzesten Verbindungen gewählt (weil das immer eine Gerade von Punkt A nach B ist), sondern ein Netzwerk aus jeweils kürzesten Verbindungen zu Nachbarplaneten. Dadurch kann es vor allem am Rand vorkommen, dass man für eigentlich kurze Strecken sehr lange Wege zurück legen muss. Aber sieh dir das am besten selbst an. Lösung wäre hier, einfach noch zusätzlich ein paar weitere Verbindungen hinzuzufügen. Edit: Irgendwas stimmt mit dem Quicksort nicht. Auf dem alten Beispiel schafft er es, die Verbindungen viel schneller zu sortieren. Hier ist er aber total langsam geworden... Edit2: Hab die Geschwindigkeitsbremse gefunden. Hatte die Funktion zum berechnen der Distanz zweier Nodes ausgelagert. Jetzt hab ich sie zurück nach TConnection_init() geschrieben, und auch noch das Sqrt() entfernt, dadurch dürfte sie sehr viel schneller sein. Zitat: b) von einem Stern X die kürzeste Strecke zu einem Stern Y durchlaufen kann (z.B. Start bei ID 5, über 7,13,27,40 zu ID 49) Das läuft auf eine simple A* implementation hinaus. Anmerkung: Ordnerstruktur ist folgendermassen: Test2.bb in den Root Alle anderen codes in Includes\ Test2.bb Code: [AUSKLAPPEN] Include "Includes\QuickSortQueue.bb"
Include "Includes\Spannbaum.bb" Include "Includes\LinkedList.bb" Include "Includes\PriorityQueue.bb" Include "Includes\AStar.bb" Global movespeed#=0.5 ms=MilliSecs() TNode_InitAll() TConnection_InitAll() Graphics3D 800,600,32,2 ; Entities cam=CreateCamera() wiref_piv = CreatePivot() solid_piv = CreatePivot() stern=CreateSphere(8) ; Sterne erzeugen For n.TNode = Each TNode n\entity=CopyEntity(stern,solid_piv) PositionEntity n\entity,n\pos[0],n\pos[1],n\pos[2] ScaleEntity n\entity,0.25,0.25,0.25 Next ;Vom ersten Stern aus die kürzesten Wege zu allen anderen Berechnen und die entsprechenden Routen anzeigen. TConnection_CreateSpanningTree(First TNode) TConnections_Show() ende=MilliSecs()-ms While Not KeyHit(1) ; FPS messung FPS_C=FPS_C+1 : If ms<MilliSecs() Then ms=MilliSecs()+1000 : FPS=FPS_C : FPS_C=0 ; Frame tweening Tween#=Float(MilliSecs()-FrameTime)/Float(20.0) : FrameTime=MilliSecs() ; Maussteuerung mxs#=MouseXSpeed() : mys#=MouseYSpeed() : pitch#=EntityPitch(cam)+(mys#/5) If pitch>89 Then pitch=89 Else If pitch<-89 Then pitch=-89 RotateEntity cam,pitch,EntityYaw(cam)-(mxs#/5),0 MoveMouse GraphicsWidth()/2,GraphicsHeight()/2 ; Tastatursteuerung If KeyDown(200) Then MoveEntity cam,0,0,movespeed*tween If KeyDown(208) Then MoveEntity cam,0,0,-movespeed*tween If KeyDown(205) Then MoveEntity cam,movespeed*tween,0,0 If KeyDown(203) Then MoveEntity cam,-movespeed*tween,0,0 If KeyHit(57) Then wf=1-wf If KeyHit(28) ;Einen Weg berechnen von star1 -> star2 Local offset# = 0.4 Local star1.TNode = NODE_ARRAY(Rand(0,NODES-1)) Local star2.TNode = NODE_ARRAY(Rand(0,NODES-1)) ;Weg von star1 nach star2 finden Local path.TPathNode = AStar_getPath(star1,star2) ;Weg einzeichnen & Startplanet grün sowie Zielplanet rot markieren EntityColor star1\entity,255,0,0 EntityColor star2\entity,0,255,0 TConnections_Show() If path<>Null TPath_Show(path) Else DebugLog "Kein Weg gefunden (eigendlich nicht moeglich)" EndIf EndIf ; Render wireframe objects. WireFrame 1 : ShowEntity wiref_piv : HideEntity solid_piv CameraClsMode cam,1,1 : RenderWorld ; Render solid objects. WireFrame wf : HideEntity wiref_piv : ShowEntity solid_piv CameraClsMode cam,0,0 : RenderWorld ; Textausgabe Text 0, 0,"FPS...............: "+FPS Text 0,15,"Baum erstellt in..: "+ende+"ms" Text 0,30,"Druecke Enter um neuen Weg zu berechnen" RenderWorld Flip 0 Wend End ; 3D Linie zeichnen Function Line3D(mesh,x0#,y0#,z0#,x1#,y1#,z1#,r%=255,g%=255,b%=255) If mesh = 0 mesh = CreateMesh() surf = CreateSurface(mesh) EntityFX mesh,1+2+16 Else last_surf = CountSurfaces(mesh) surf = GetSurface(mesh,last_surf) If CountVertices(surf) > 30000 Then surf = CreateSurface(mesh) End If v1 = AddVertex(surf,x1,y1,z1) v2 = AddVertex(surf,x0,y0,z0) AddTriangle surf,v1,v1,v2 VertexColor surf,v1,r,g,b,1 VertexColor surf,v2,r,g,b,1 Return mesh End Function Function TConnections_Show() For i% = 0 To NODES-1 c.TConnection = CurrentConnectionsArray(i) If c<>Null If c\entity FreeEntity c\entity c\entity = Line3D(mesh,c\node[0]\pos[0],c\node[0]\pos[1],c\node[0]\pos[2],c\node[1]\pos[0],c\node[1]\pos[1],c\node[1]\pos[2],0,128,255) EndIf Next End Function Function TPath_Show(path.TPathNode) If path = Null Return Local pn.TPathNode = path While pn<>Null If pn\nextPathNode<>Null c.TConnection = TConnection_getConnection.TConnection(pn\node\id,pn\nextPathNode\node\id) If c\entity FreeEntity c\entity c\entity = Line3D(mesh,c\node[0]\pos[0],c\node[0]\pos[1],c\node[0]\pos[2],c\node[1]\pos[0],c\node[1]\pos[1],c\node[1]\pos[2],255,128,0) EndIf pn = pn\nextPathNode Wend End Function QuicksortQueue.bb Code: [AUSKLAPPEN] Type TQuicksortLink Field value# Field objHandle% End Type Function TQuicksortLink_create.TQuicksortLink(value#,objectHandle%) Local pl.TQuicksortLink = New TQuicksortLink pl\value = value pl\objHandle = objectHandle Return pl End Function Function TQuicksortLink_removeFirst%() Local l.TQuicksortLink = First TQuicksortLink If l<>Null Local h% = l\objHandle Delete l Return h EndIf End Function Function TQuicksortLink_removeLast%() Local l.TQuicksortLink = Last TQuicksortLink If l<>Null Local h% = l\objHandle Delete l Return h EndIf End Function Function TQuicksort_clear() For ql.TQuicksortLink = Each TQuicksortLink Delete ql Next End Function Function TQuicksort_sort() TQuicksort_sortPart(First TQuicksortLink,Last TQuicksortLink) End Function Function TQuicksort_sortPart(f.TQuicksortLink,l.TQuicksortLink) If f = l Return If l = Null Return If f = Null Return p.TQuicksortLink = f e.TQuicksortLink = l ;p = pivot element this.TQuicksortLink = f enum.TQuicksortLink = After this While this<>e And enum<>Null this = enum enum = After enum If this\value < p\value Insert this Before f f = this Else Insert this After l l = this EndIf Wend TQuicksort_sortPart(f,p) TQuicksort_sortPart(After p,l) End Function Spannbaum.bb Code: [AUSKLAPPEN] Const NODES%=500 Global NODES_XDIST# = 100 / 2 Global NODES_YDIST# = 100 / 2 Global NODES_ZDIST# = 100 / 2 Global CurrentConnections_counter% = 0 Dim CurrentConnectionsArray.TConnection(NODES-1) Dim NODE_ARRAY.TNode(NODES) Type TNode Field id% Field entity% Field pos#[3] Field connected% End Type Function TNode_getDistanceBetween(n1.TNode,n2.TNode) Return Sqr(n1\pos[0]-n2\pos[0])*(n1\pos[0]-n2\pos[0])+(n1\pos[1]-n2\pos[1])*(n1\pos[1]-n2\pos[1])+(n1\pos[2]-n2\pos[2])*(n1\pos[2]-n2\pos[2]) End Function Type TConnection Field node.TNode[2] Field dist# Field valid% Field entity% End Type Global CONNECTIONS% = TConnection_calcConnCount%() Dim CONNECTION_ARRAY.TConnection(CONNECTIONS) Function TConnection_calcConnCount%() Return (NODES*(NODES+1)/2) - NODES; See http://de.wikipedia.org/wiki/Der_kleine_Gau%C3%9F End Function Function minInt(c1%,c2%) If c1<=c2 Return c1 Return c2 End Function Function maxInt(c1%,c2%) If c1>=c2 Return c1 Return c2 End Function Function TConnection_getConnection.TConnection(n1%,n2%) If n1=n2 Return Null Return CONNECTION_ARRAY(TConnection_getArrayPos(n1,n2)) End Function Function TConnection_getArrayPos%(n1%,n2%) Local na% = minInt(n1,n2) Local nb% = maxInt(n1,n2) Local pos% = 0 For i% = 1 To na pos = pos + Sgn((na-i)) * (NODES - i) Next pos = pos + (nb-na) - 1 Return pos End Function Function TConnection_getConnectionTest() For i% = 5000 To 5005 Local c2.TConnection = TConnection_getConnection((i/1000)+1,(i Mod 1000)+1) If c2<>Null Print ((i/1000)+1)+"/"+((i Mod 1000)+1) + " = "+c2\node[0]\id + "/"+c2\node[1]\id EndIf Next End Function Function TNode_InitAll() DebugLog "Init Nodes" For i% = 1 To NODES Local n.TNode = New TNode n\id = i n\pos[0] = Rnd(-NODES_XDIST,NODES_XDIST) n\pos[1] = Rnd(-NODES_YDIST,NODES_YDIST) n\pos[2] = Rnd(-NODES_ZDIST,NODES_ZDIST) NODE_ARRAY(i-1) = n Next End Function Function TConnection_Create.TConnection(n1.TNode,n2.TNode) Local c.TConnection = New TConnection c\node[0] = n1 c\node[1] = n2 c\dist = (n1\pos[0]-n2\pos[0])*(n1\pos[0]-n2\pos[0])+(n1\pos[1]-n2\pos[1])*(n1\pos[1]-n2\pos[1])+(n1\pos[2]-n2\pos[2])*(n1\pos[2]-n2\pos[2]) Return c End Function Function TConnection_InitAll() DebugLog "Init Connections" Local stmp% = NODES-1 Local c% = 0 TQuicksort_Clear() For i1% = 0 To stmp For i2% = i1 To stmp If i1<>i2 CONNECTION_ARRAY(c) = TConnection_Create(NODE_ARRAY(i1),NODE_ARRAY(i2)) TQuicksortLink_create.TQuicksortLink(CONNECTION_ARRAY(c)\dist,Handle(CONNECTION_ARRAY(c))) c = c + 1 EndIf Next Next DebugLog "sorting connections: ..." Local time% = MilliSecs() TQuicksort_sort() DebugLog "sorting connections: finished within "+(MilliSecs()-time)+" ms" End Function Function TConnection_CreateSpanningTree(startNode.TNode) DebugLog "Reset" CurrentConnections_counter = 0 For n.TNode = Each TNode n\connected = False Next For c.TConnection = Each TConnection c\valid = False Next DebugLog "calculating min spanning tree" startNode\connected = True For i% = 1 To NODES TConnection_CreateSpanningTree_Sub() Next DebugLog "cleaning up" ;For qsl.TQuicksortLink = Each TQuicksortLink ; Local c.TConnection = Object.TConnection(qsl\objHandle) ; If c\node[0]\connected And c\node[1]\connected ; Local pos% = TConnection_getArrayPos%(c\node[0]\id,c\node[1]\id) ; If CONNECTION_ARRAY(pos)<>Null Delete CONNECTION_ARRAY(pos) ; CONNECTION_ARRAY(pos) = Null ; EndIf ;Next TQuickSort_clear() DebugLog "finished calc spanning tree" For i% = 0 To NODES-1 c.TConnection = CurrentConnectionsArray(i) If c<>Null DebugLog "c "+c\node[0]\id+" <--> "+c\node[1]\id+" dist:"+c\dist Next End Function Function TConnection_CreateSpanningTree_Sub() ;Kleinste Kante wählen die Graph mit noch nicht verb. Knoten verbindet. For qsl.TQuicksortLink = Each TQuicksortLink Local c.TConnection = Object.TConnection(qsl\objHandle) If c\node[0]\connected Xor c\node[1]\connected c\node[0]\connected = True c\node[1]\connected = True c\valid = True CurrentConnectionsArray(CurrentConnections_counter) = c CurrentConnections_counter = CurrentConnections_counter + 1 Delete qsl Return EndIf Next End Function LinkedList.bb Code: [AUSKLAPPEN] ;LinkedList.bb
;version 1.0 ;by Christian Geißler ;24.1.2009 ;;Beispiel zur Benutzung: ;Local list.TList = new TList ;TList_addLast(list,5) ;werte Einfügen (oder Handles) ;TList_addLast(list,2) ;werte Einfügen (oder Handles) ; ;;Beispiel zum durchgehen der Links ;Local link.TLink = TList_firstLink(list) ;While link<>Null ; Print TLink_value(link) ; link = TLink_nextLink(link) ;Wend ;STRUCT TList Type TList Field f.TLink ;first link Field l.TLink ;last link Field count% End Type Function TList_first%(l.TList) Return TLink_value(l\f) End Function Function TList_last%(l.TList) Return TLink_value(l\l) End Function Function TList_firstLink.TLink(l.TList) Return l\f End Function Function TList_lastLink.TLink(l.TList) Return l\l End Function Function TList_addLast.TLink(list.TList,value%) Local newLink.TLink = TLink_create(list,list\l,Null,value) Return newLink End Function Function TList_insertBeforeLink(link.TLink,value%) TLink_insertBefore(link,value) End Function Function TList_insertAfterLink(link.TLink,value%) TLink_insertAfter(link,value) End Function Function TList_addFirst.TLink(list.TList,value%) Local newLink.TLink = TLink_create(list,Null,list\f,value) Return newLink End Function ;removes last link and returns its value Function TList_removeLast%(l.TList) Return TLink_remove(l\l) End Function ;removes first link and returns its value Function TList_removeFirst%(l.TList) Return TLink_remove(l\f) End Function ;returns count of elements in this list Function TList_count%(l.TList) Return l\count End Function ;clears all values from list Function TList_clear(l.TList) While l\f<>Null TList_removeFirst(l.TList) Wend End Function ;STRUCT TLink Type TLink Field n.TLink ;next link Field p.TLink ;previous link Field list.TList Field value% End Type Function TLink_create.TLink(list.TList,pL.TLink,nL.TLink,val%) If list = Null Return Null Local l.TLink = New TLink l\p = pL l\n = nL If pL<>Null If pL\n = nL pL\n = l Else DebugLog "ERROR" EndIf Else ;then this should be the first one list\f = l EndIf If nL<>Null If nL\p = pL nL\p = l Else DebugLog "ERROR" EndIf Else ;then this should be the last one list\l = l EndIf l\list = list list\count = list\count + 1 l\value = val Return l End Function Function TLink_insertBefore(link.TLink,value%) TLink_create(link\list,link\p,link,value) End Function Function TLink_insertAfter(link.TLink,value%) TLink_create(link\list,link,link\n,value) End Function Function TLink_value%(link.TLink) If link<>Null Return link\value End Function Function TLink_nextLink.TLink(link.TLink) Return link\n End Function Function TLink_prevLink.TLink(link.TLink) Return link\p End Function Function TLink_remove%(l.TLink) If l = Null Return If l\p<>Null l\p\n = l\n EndIf If l\n<>Null l\n\p = l\p EndIf If l=l\list\f l\list\f = l\n EndIf If l=l\list\l l\list\l = l\p EndIf l\list\count = l\list\count - 1 l\p = Null l\n = Null l\list = Null Local val% = l\value Delete l Return val End Function PriorityQueue.bb Code: [AUSKLAPPEN] ;PriorityQueue.bb
;version 1.1 ;by Christian Geißler ;24.1.2009 Type TPriorityQueue Field list.TList End Type Function TPriorityQueue_create.TPriorityQueue() Local pq.TPriorityQueue = New TPriorityQueue pq\list = New TList Return pq End Function Function TPriorityQueue_delete(pq.TPriorityQueue) TList_clear(pq\list) pq\list = Null Delete pq End Function Function TPriorityQueue_clear(pq.TPriorityQueue) TList_clear(pq\list) End Function ;Adds an objectHandle whitch might be a very low one ;meaning it starts testing from the lower end of the list Function TPriorityQueue_addLowest(pq.TPriorityQueue,objectHandle%,value#) Local newPL.TPriorityLink = TPriorityLink_create(value,objectHandle) Local oldPL.TPriorityLink = Null Local link.TLink = TList_firstLink(pq\list) While link<>Null oldPL = Object.TPriorityLink(TLink_value(link)) If newPL\value<=oldPL\value TList_insertBeforeLink(link,Handle(newPL)) Return EndIf link = TLink_nextLink(link) Wend TList_addLast(pq\list,Handle(newPL)) End Function ;Adds an objectHandle whitch might be a very high one ;meaning it starts testing from the higher end of the list Function TPriorityQueue_addHighest(pq.TPriorityQueue,objectHandle%,value#) Local newPL.TPriorityLink = TPriorityLink_create(value,objectHandle) Local oldPL.TPriorityLink = Null Local link.TLink = TList_lastLink(pq\list) While link<>Null oldPL = Object.TPriorityLink(TLink_value(link)) If newPL\value>=oldPL\value TList_insertAfterLink(link,Handle(newPL)) Return EndIf link = TLink_prevLink(link) Wend TList_addFirst(pq\list,Handle(newPL)) End Function ;Adds an objectHandle to either the end or the beginning of the list (takes that one that seems better) Function TPriorityQueue_add(pq.TPriorityQueue,objectHandle%,value#) Local pl.TPriorityLink = Object.TPriorityLink(TList_first(pq\list)) If pl<>Null If pl\value > value ;insert at the beginning TPriorityQueue_addLowest(pq,objectHandle%,value#) Else TPriorityQueue_addHighest(pq,objectHandle%,value#) EndIf Else TPriorityQueue_addLowest(pq,objectHandle%,value#) EndIf End Function ;returns: Handle of object with lowest value Function TPriorityQueue_getLowest%(pq.TPriorityQueue) Local pl.TPriorityLink = Object.TPriorityLink(TList_first(pq\list)) If pl<>Null Return pl\objHandle End Function ;returns: Handle of object with highest value Function TPriorityQueue_getHighest%(pq.TPriorityQueue) Local pl.TPriorityLink = Object.TPriorityLink(TList_last(pq\list)) If pl<>Null Return pl\objHandle End Function ;returns: Handle of object with lowest value Function TPriorityQueue_removeLowest%(pq.TPriorityQueue) Local pl.TPriorityLink = Object.TPriorityLink(TList_removeFirst(pq\list)) If pl<>Null Return pl\objHandle End Function ;returns: Handle of object with highest value Function TPriorityQueue_removeHighest%(pq.TPriorityQueue) Local pl.TPriorityLink = Object.TPriorityLink(TList_removeLast(pq\list)) If pl<>Null Return pl\objHandle End Function Function TPriorityQueue_count%(pq.TPriorityQueue) Return TList_count(pq\list) End Function Type TPriorityLink Field value# Field objHandle% End Type Function TPriorityLink_create.TPriorityLink(value#,objectHandle%) Local pl.TPriorityLink = New TPriorityLink pl\value = value pl\objHandle = objectHandle Return pl End Function AStar.bb Code: [AUSKLAPPEN] ;AStar for TNode and TConnection
;include Spannbaum.bb ;include PriorityQueue.bb ;finds a minimal path between start and finish ;(Hinweis: Sucht aus praktischen Gründen vom Ende zum Start, damit die Liste nachher nicht umgedreht werden muss. Function AStar_getPath.TPathNode(start.TNode,finish.TNode) Local visited%[NODES] Local n.TPathNode = Null Local nn.TPathNode = Null Local whitelist.TPriorityQueue = TPriorityQueue_create() n = TPathNode_create(finish,Null) TPriorityQueue_addLowest(whitelist,Handle(n),TPathNode_CalcValue(n,start)) visited[n\node\id] = True While n\node <> start n = Object.TPathNode(TPriorityQueue_removeLowest%(whitelist)) If n = Null Exit If n\node = start Exit For i% = 0 To NODES-1 Local c.TConnection = CurrentConnectionsArray(i) If c<>Null If c\node[0] = n\node Or c\node[1] = n\node If Not visited[c\node[1]\id] visited[c\node[1]\id] = True nn = TPathNode_create(c\node[1],n) TPriorityQueue_addLowest(whitelist,Handle(nn),TPathNode_CalcValue(nn,start)) ElseIf Not visited[c\node[0]\id] visited[c\node[0]\id] = True nn = TPathNode_create(c\node[0],n) TPriorityQueue_addLowest(whitelist,Handle(nn),TPathNode_CalcValue(nn,start)) EndIf EndIf EndIf Next Wend TPriorityQueue_Delete(whitelist) Return n End Function Type TPathNode Field node.TNode Field nextPathNode.TPathNode Field value# Field travelDist# ;left over travel distance to target point End Type Function TPathNode_create.TPathNode(node.TNode,nextNode.TPathNode) Local pn.TPathNode = New TPathNode pn\node = node pn\nextPathNode = nextNode If nextNode<>Null pn\travelDist = nextNode\travelDist + TNode_getDistanceBetween(node,nextNode\node) EndIf Return pn End Function ;calculates node value ;this is the heuristic of AStar Function TPathNode_CalcValue#(current.TPathNode,start.TNode) Return TNode_getDistanceBetween(current\node,start) + current\travelDist End Function Function TPathNode_deletePath(path.TPathNode) While path<>Null Local n.TPathNode = path\nextPathNode Delete path path = n Wend End Function |
||
|
www.illusion-games.de
Space War 3 | Space Race | Galaxy on Fire | Razoon Gewinner des BCC #57 User posted image |
||
Krischan |
Antworten mit Zitat |
|
|---|---|---|
|
Ich bin mehr als beeindruckt. Genauso sollte das aussehen, uiiiii Eine Frage habe ich noch: wenn ich 1000 Nodes erstelle anstatt 500 braucht das Programm fast 4x so lange, woran liegt denn das? Müsste der Aufwand nicht linear ansteigen? Habs mal grob gemessen: 10 Nodes = 250ms 50 Nodes = 250ms 100 Nodes = 250ms 200 Nodes = 300ms 300 Nodes = 400ms 400 Nodes = 500ms 500 Nodes = 700ms 750 Nodes = 1400ms 1000 Nodes = 2400ms 1500 Nodes = 5700ms Die Zeit für die Pfadsuche hingegen ist sehr schnell: unter 15ms bei 500 Nodes! |
||
|
|
Firstdeathmaker |
Antworten mit Zitat |
|---|---|---|
|
Nein. Der Aufwand des Kruskal-Algorithmus wird hauptsächlich vom benutzten Sortieralgorithmus bestimmt. Und dieser ist Quicksort, mit einer Laufzeit zwischen Optimal O(n*log(n)) und WorstCase O(n^2).
Ich hab in meinem Code mal den Quicksort durch einen von Ralliman geschriebenen ersetzt, welcher noch etwas besser optimiert ist, aber das ändert nichts am mehr als linearen Anstieg der Laufzeit für größere n. Man kann durch die Änderung nochmal 6% mehr Geschwindigkeit rausholen (nach meinen Messungen). https://www.blitzforum.de/foru...=quicksort QuickSortQueue.bb Code: [AUSKLAPPEN] ;QuickSortQueue.bb
;version 1.0 ;by Christian Geißler ;using Rallimen's Quicksort Program ;24.1.2009 Type TQuicksortLink Field value# Field objHandle% End Type Function TQuicksortLink_create.TQuicksortLink(value#,objectHandle%) Local pl.TQuicksortLink = New TQuicksortLink pl\value = value pl\objHandle = objectHandle Return pl End Function Function TQuicksortLink_removeFirst%() Local l.TQuicksortLink = First TQuicksortLink If l<>Null Local h% = l\objHandle Delete l Return h EndIf End Function Function TQuicksortLink_removeLast%() Local l.TQuicksortLink = Last TQuicksortLink If l<>Null Local h% = l\objHandle Delete l Return h EndIf End Function Function TQuicksort_clear() For ql.TQuicksortLink = Each TQuicksortLink Delete ql Next End Function Function TQuicksort_sort() L.TQuicksortLink = First TQuicksortLink If L.TQuicksortLink = Null Return R.TQuicksortLink = Last TQuicksortLink If L.TQuicksortLink = R.TQuicksortLink Return TQuicksort_sortPart(L.TQuicksortLink,R.TQuicksortLink) End Function Function TQuicksort_sortPart(P1.TQuicksortLink,P2.TQuicksortLink) ;Rallimen P4.TQuicksortLink = P1:P3.TQuicksortLink = P1 While Not P5 P3.TQuicksortLink = After P3 If P3.TQuicksortLink = P2 P5 = True If P3\value < P4\value If P5 P2.TQuicksortLink = Before P2 P6.TQuicksortLink = P3 : P3.TQuicksortLink = Before P3 Insert P6.TQuicksortLink Before P1 : P1.TQuicksortLink = P6 Else If P3\value = P4\value If P7.TQuicksortLink = Null P7.TQuicksortLink = P3 :P3.TQuicksortLink = Before P3 If P5 P2.TQuicksortLink = Before P2 Insert P7.TQuicksortLink Before P4 If P4.TQuicksortLink = P1.TQuicksortLink P1.TQuicksortLink = P7 Else P6.TQuicksortLink = P3 P3.TQuicksortLink = Before P3 If P5 P2.TQuicksortLink = Before P2 Insert P6.TQuicksortLink Before P4 End If End If End If Wend If P7.TQuicksortLink = Null If P4.TQuicksortLink <> P1 P8.TQuicksortLink = Before P4 Else If P7.TQuicksortLink <> P1 P8.TQuicksortLink = Before P7 End If If P8.TQuicksortLink <> Null If P8.TQuicksortLink <> P1 TQuicksort_sortPart P1.TQuicksortLink,P8.TQuicksortLink If P4.TQuicksortLink <> P2 P9.TQuicksortLink = After P4 If P9.TQuicksortLink <> Null If P9.TQuicksortLink <> P2 TQuicksort_sortPart P9.TQuicksortLink,P2.TQuicksortLink End If End Function |
||
|
www.illusion-games.de
Space War 3 | Space Race | Galaxy on Fire | Razoon Gewinner des BCC #57 User posted image |
||
Übersicht
Powered by phpBB © 2001 - 2006, phpBB Group